
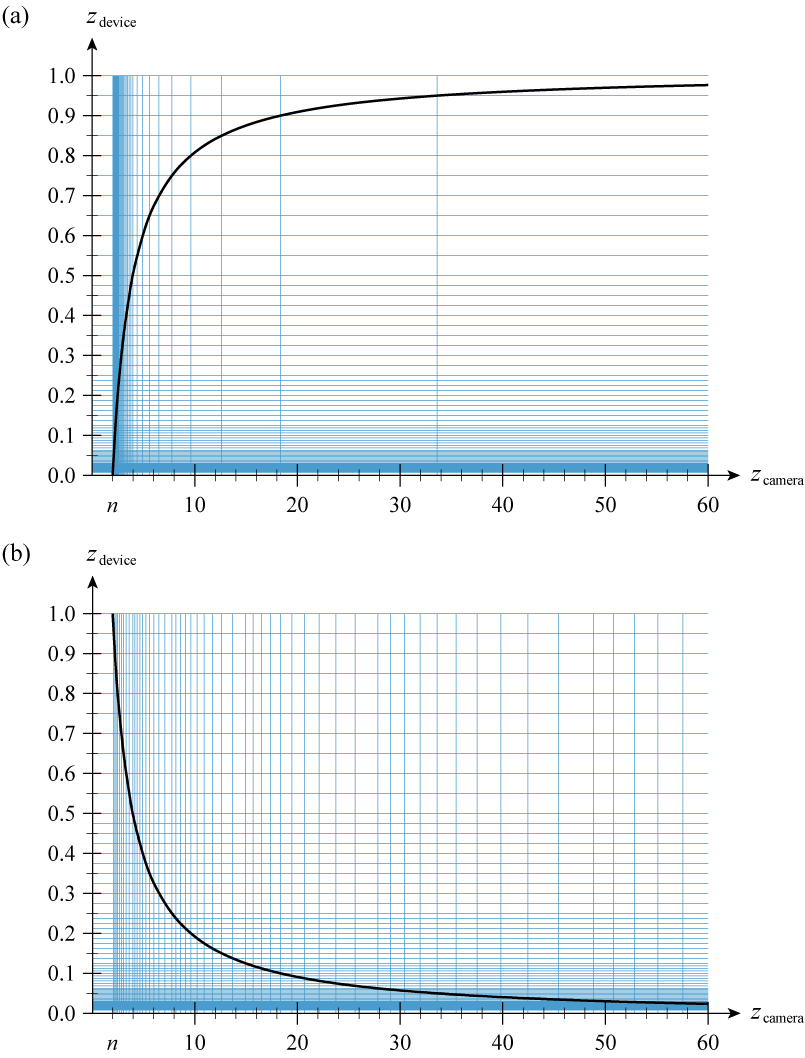
@m_schuetz @CianNoonan The superior distribution is demonstrated by the vertical lines in this diagram from Foundations of Game Engine Development, Vol. 2. (a) Depth is mapped from 0 to 1. (b) Depth is mapped from 1 to 0. amazon.com/dp/0985811757/… 
• • •
Missing some Tweet in this thread? You can try to
force a refresh







