Interesting video from the cockpit of an A350 flying from Copenhagen to Bangkok. "The challenge on this route is like the jamming and the spoofing. But we know how to deal with that now. You'll see later on when we come close to Ukraine a lot of our systems will fall out" 

"The worst thing about this is the spoofing so uh because of the jamming the airplane may think it's it's a different place than where it is right so and then it'll it could give us some failures that we have to handle."

"That also happens in the northern part of uh Norway and actually sometimes going close to Kaliningrad."

[They start to lose GPS.] "It's only a problem if you are going to land somewhere." "For en route navigation is not a problem we use this system. The IRS, the inertial reference system, that's super reliable."

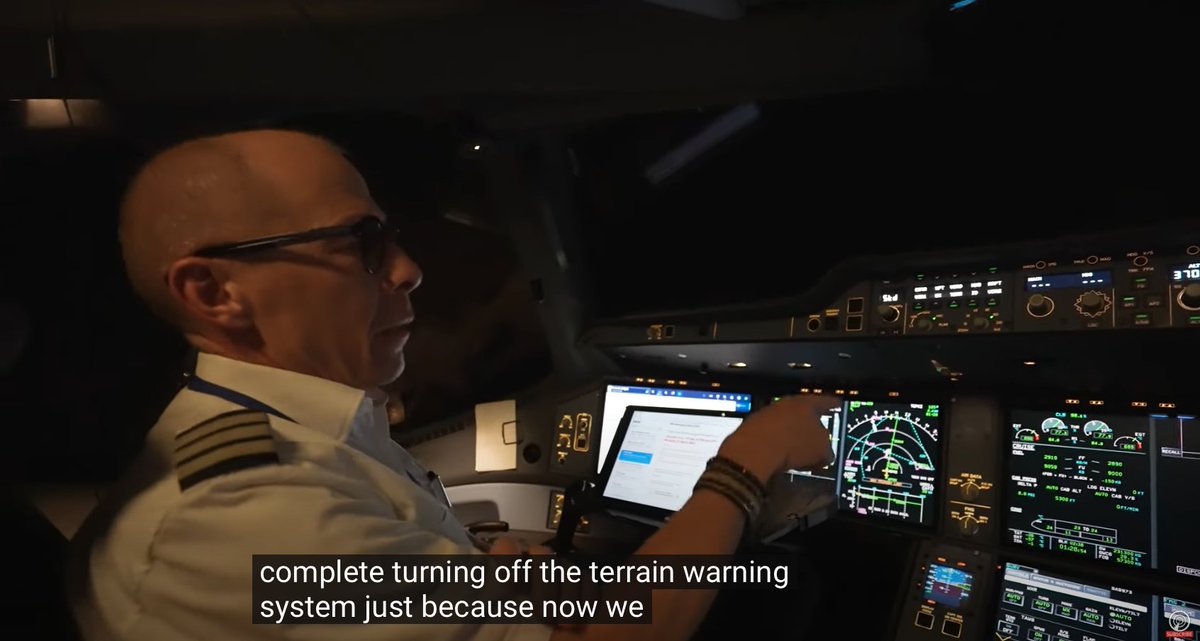
"Turning off the terrain warning system, just because now we get so many of these jamming problems that we want to make sure that we don't get these terrain warnings on the screen in the middle of the night."
"Right now we have no satellites at all, all the satellites are gone so when we see that the satellites are coming back then we can turn it back on again."

Video:
Systems listed in orange are inoperative. RNP AR, GNSS 1, ADS-B TRAFFIC 1+2, APU, GLS AUTOLAND, GLS 1, SLS 1.

"I was sitting here one day, and I saw the clock going backwards."

Watching these pilots deal with systems they can no longer use or trust, I'm reminded of a quote from a major airline's Chief Operations Officer about GPS interference: "Navigation is not my problem. My problem is normalization of deviance."

I think this is the flight: SAS973 on 2024-03-19 (thanks, @giammaiot2). The bad GPS jamming happened over the Black Sea, about 10 minutes before entering Turkey.


• • •
Missing some Tweet in this thread? You can try to
force a refresh