
Many others will be sharing photos this morning. I'm going to do something different: read through Maki et al. (2020), the paper describing Perseverance's engineering cameras, and provide you some context for those pictures. link.springer.com/article/10.100… 

First: What and Where are the cameras? From left:
- 3 Parachute Uplook Cameras (PUC), mounted to backshell
- 1 Descent Downlook Camera (DDC), mounted to descent stage, pointing at rover
- 1 each Rover Uplook & Rover Downlook Camera, mounted to top & bottom of rover deck
- 3 Parachute Uplook Cameras (PUC), mounted to backshell
- 1 Descent Downlook Camera (DDC), mounted to descent stage, pointing at rover
- 1 each Rover Uplook & Rover Downlook Camera, mounted to top & bottom of rover deck

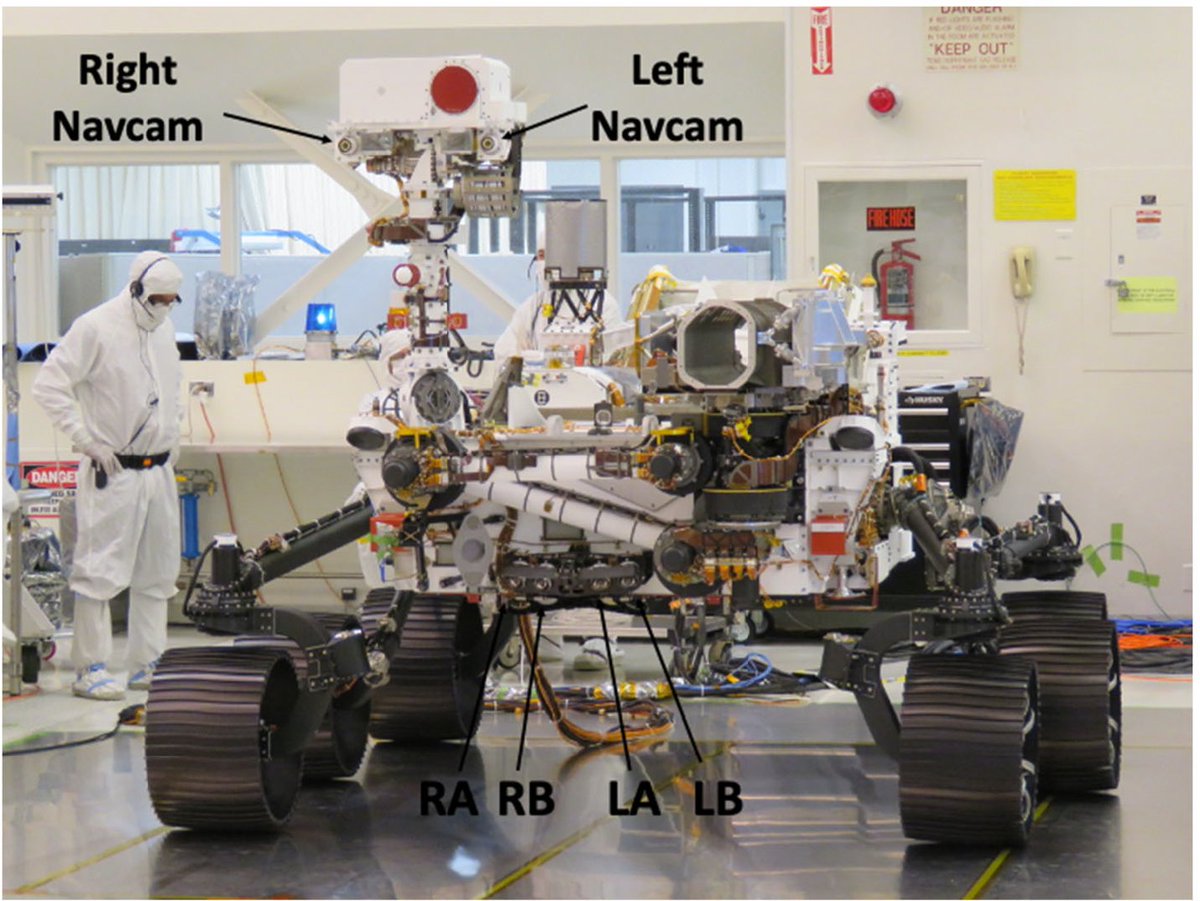
- 2 Navcams, on mast, for surveying landscape for driving
- 6 Hazcams, on rover body, 4 front & 2 rear. Only 1 front pair is in use at a time (others are for redundancy), for surveying near field for drive safety & arm positioning
- 1 Cachecam inside rover body for sample images
- 6 Hazcams, on rover body, 4 front & 2 rear. Only 1 front pair is in use at a time (others are for redundancy), for surveying near field for drive safety & arm positioning
- 1 Cachecam inside rover body for sample images


Of these, parachute uplook and descent downlook cameras are now kaput; their images should be stars of today's show. Also rover uplook & downlook images should be amazing. Those cameras aren't needed for surface mission but will no doubt be used. Hazcams we'll see today too.
Navcams can't be used until mast is raised (and neither can the Mastcam-Zs, or the Supercam imager, 2 of the science cameras, which will likely get first use in first week of mission).
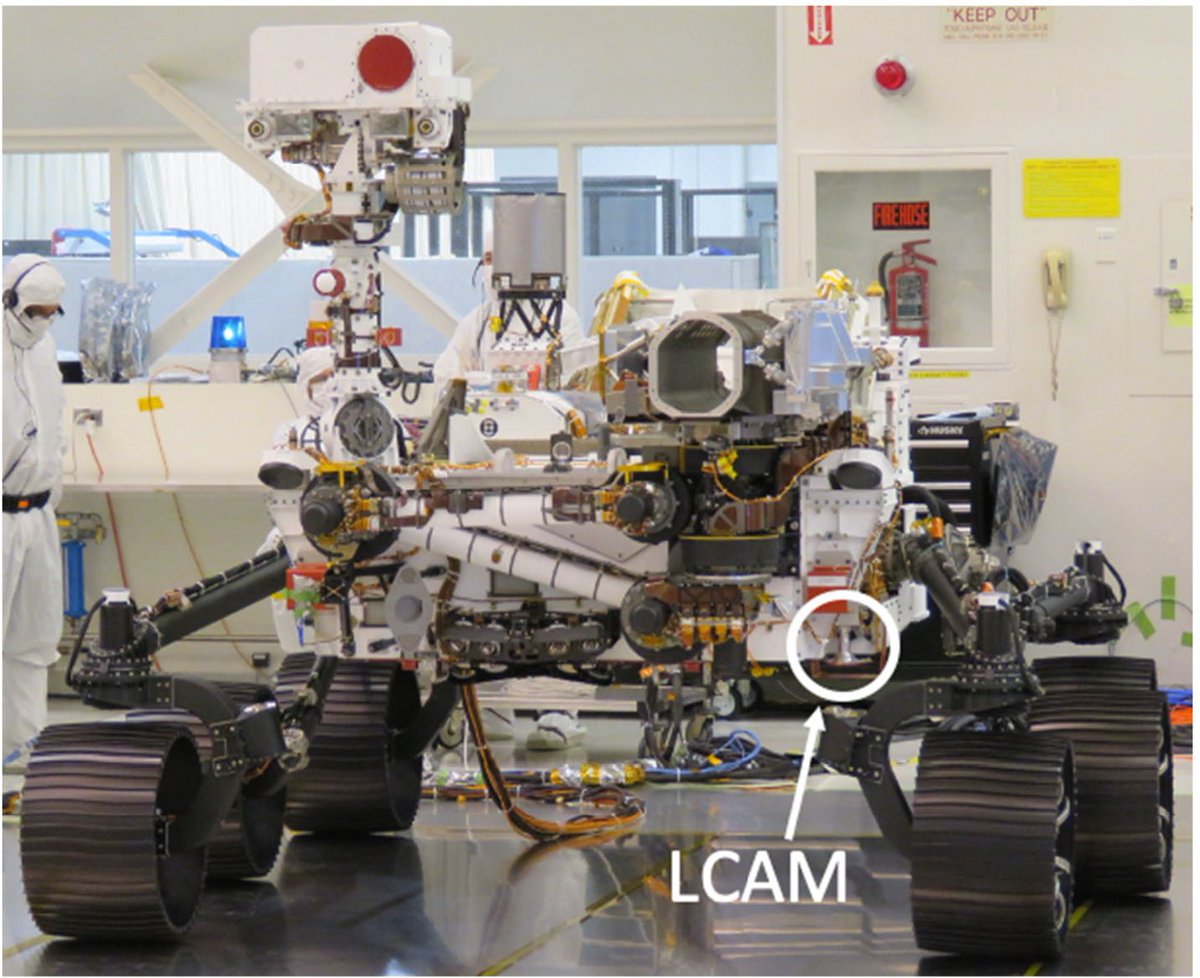
Oh I almost forgot: the LCAM, Landing Camera, part of the Lander Vision System (LVS, pronounced "Elvis"), will also be a star today: it looked down from rover and imaged landing site to help rover pilot itself to a safe spot. It, too, could be used during surface mission.
Here's the first amazing DDC (descent downlook camera) image!! It's amazing but also I'm struck by how apt the term "umbilical" is for the cable that is supplying power from the rover to the descent stage, and receiving image data and telemetry from the descent stage to the rover
All of the engineering cameras -- 3 PUC, 1 DDC, 1 RUC, 1 RDC, 1 LCAM, 6 Hazcamss, 2 Navcams, 1 Cachecam -- use the same detector, a CMV-20000 CMOS detector with a Bayer filter, 5120 x 3840 pixels, digitized at 12 bits/pixel, with exposure times from 411 to 3277 milliseconds.
Camera optics differ, which gives them different fields of view and resolutions. This table describes Nav, Haz, and Cachecams. Roughly, Nav are 2m above surface with 90-degree field of view; Front Haz are 73cm above surface, tilted 28deg down, with 100X135deg FOV.


One MAJOR difference between Perseverance and Curiosity engineering cameras is much more control over windowing & resolution of images returned to Earth. Other is is they can be full RGB color. Details are too complicated for twitter thread; will blog about it later.

OK. Next part of this Twitter essay on Maki et al 2020 paper describing Perseverance engineering cameras: What can we look forward to seeing from the cameras that were all over the descent hardware? In short: AMAZING HIGH-RES VIDEO. It'll take weeks to get all the frames down.
Parachute Uplook Cameras (PUCs) took 75 frames per second immediately before parachute deployment for 30 sec, followed by 30 fps til backshell separation ~98 sec later. So about 5,000 images per camera, 3 cameras, showing parachute inflation and performance throughout descent.
Descent Downlook Camera (DDC) took 12fps from just before rover separation, through touchdown. That video will be about 75 sec long, about 900 images, showing rover reeling out from descent stage, dust billowing, wheels touching surface.
Rover Downlook Camera (RDC) took 30fps from just before heat shield separation, all the way to surface, about 260 sec, 7800 images. Will show heat shield falling away, rover drifting under parachute, jerk as it drops from descent stage, divert maneuver, surface approaching, TD.
Rover Uplook Camera (RUC) took 30fps for about 140s, about 4200 images, from just before rover separation from descent stage. Will show reverse view of reeling out of rover + dynamics of cables after they're cut and motion of descent stage as it flies away to crash.
All told, almost 30,000 engineering-camera images of the landing. This is a LOT of data. They will get thumbnail versions on the ground first, with a few selected full-res frames. They'll use thumbnails to identify highest priority full-res frames & command those down first.
Fortunately, they have four, count them, four orbiters doing downlink for them right now, mostly Mars Reconnaissance Orbiter and MAVEN, but ExoMars will be a big help, too, and trusty Odyssey is a reliable, if smaller link in the afternoon and early morning.
I'll end the thread here for now -- I have to go do other work today -- but please ask questions and I will answer some in a future blog post. If you like this kind of tech geekery, please support me via Patreon! patreon.com/elakdawalla
• • •
Missing some Tweet in this thread? You can try to
force a refresh



