Director of the Robot Learning Lab at Imperial College London.
Nov 21, 2024 • 6 tweets • 3 min read
This is a single uncut video, showing a robot learning several tasks instantly, after just one demonstration each ...
This is possible because we've now been able to achieve in-context learning for everyday robotics tasks, and I'm very excited to announce our latest paper:
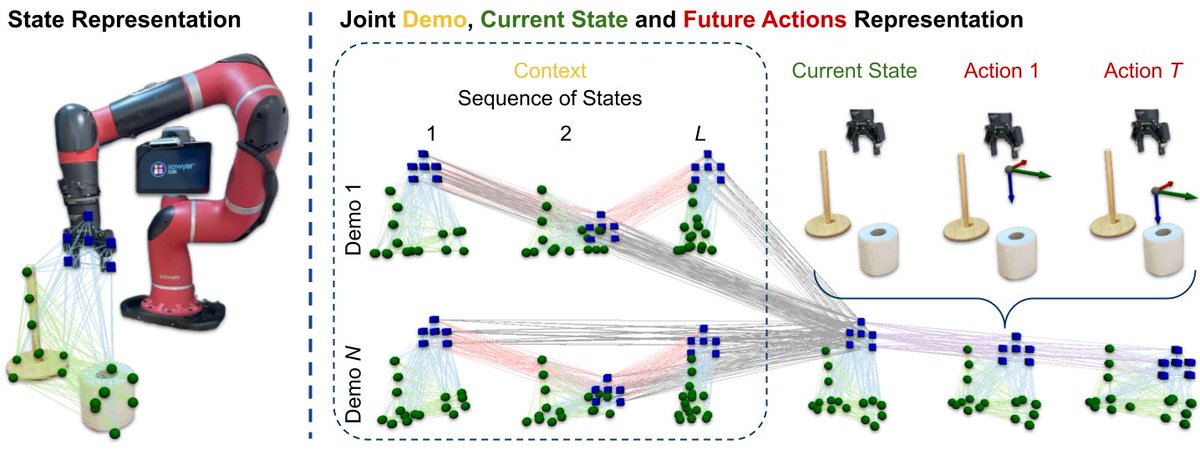
🎆 Instant Policy: In-Context Imitation Learning via Graph Diffusion 🎆
(1/6) 🧵👇
In-context learning is where a trained model accepts examples of a new task (the "context") at its input, and can then make predictions for that same task given a novel instance of it, without any further training or weight updates.
Achieving this in robotics is very exciting: with Instant Policy, we can now provide one or a few demonstrations (the "context"), and the robot instantly learns a closed-loop policy for that task, which it can then immediately perform.
(2/6)
Nov 14, 2024 • 5 tweets • 2 min read
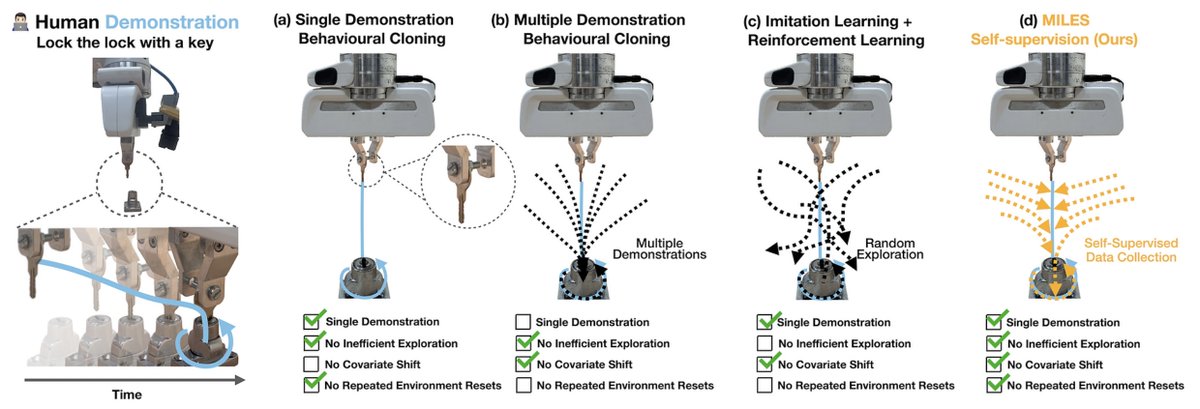
Want to teach your robot new tasks from only a single demo?
We've just released code for MILES, which we presented at CoRL 2024 last week.
Learning is fully automated: you just provide a single demonstration, then sit back and relax! 🍹😴