We're open-sourcing our Earth Rover platform with @huggingface & @sigrobotics!
🤖 Integrated hardware (electronics, software, 3D files) with @LeRobotHF
🌎 7,000 hours of driving data from 40+ cities, curated by UC Berkeley researchers
Thread ↓
What started out as "Pokemon Go with Sidewalk Robots" game has now grown into a research platform where labs around the world are leveraging Earth Rovers to advance their autonomous urban navigation research.
A team from UC Berkeley has built a state-of-the-art navigation model called LogoNav, using @frodobots crowd-sourced dataset for training & our global robot fleet for real-world evaluation in 6 countries.
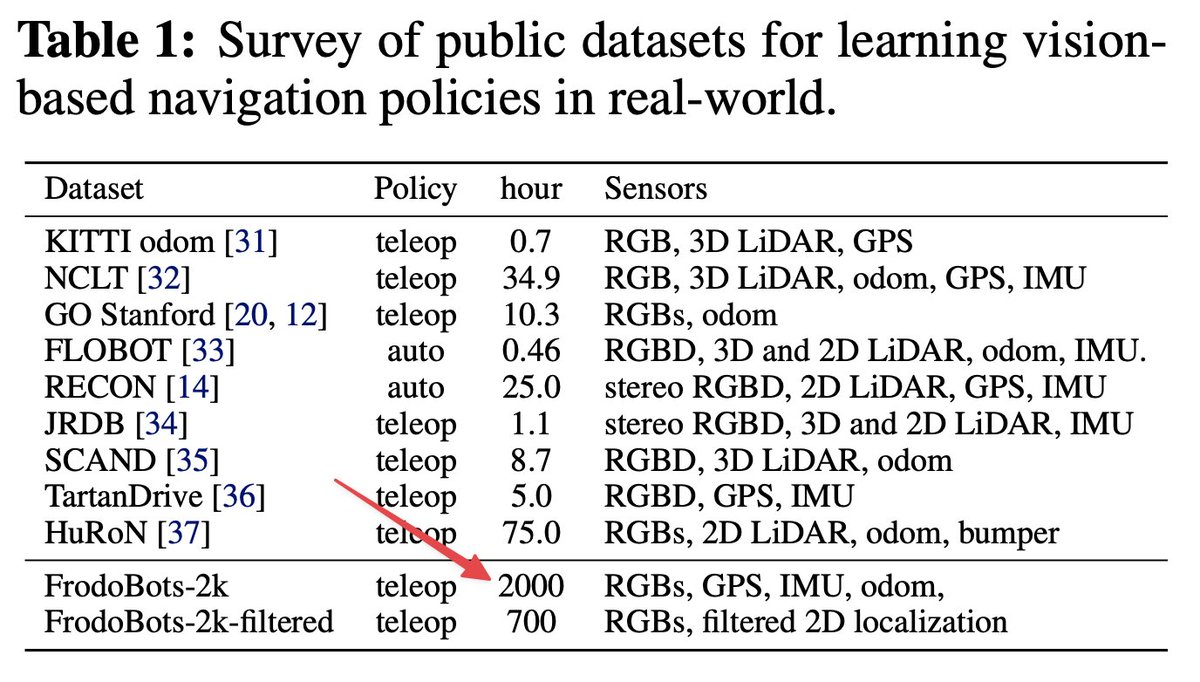
Last year, we open-sourced a large-scale urban navigation dataset called FrodoBots-2K:
As mentioned in the paper, this dataset is 25 times larger than other datasets and includes a diverse set of real robot trajectories teleoperated by human gamers. huggingface.co/datasets/frodo…