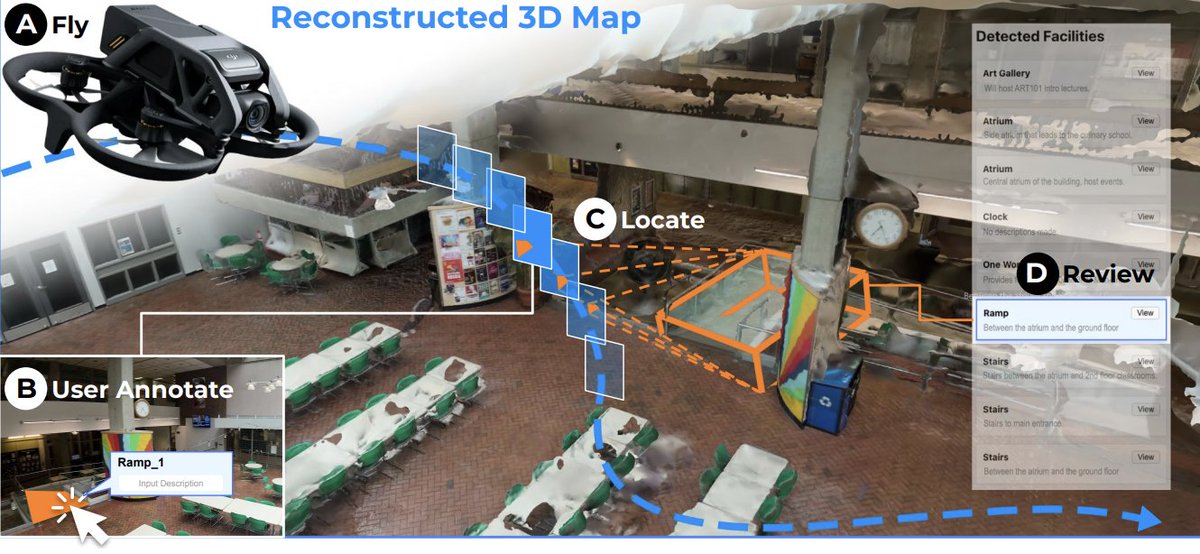
 < The Problem: Indoor Maps are Missing >
< The Problem: Indoor Maps are Missing >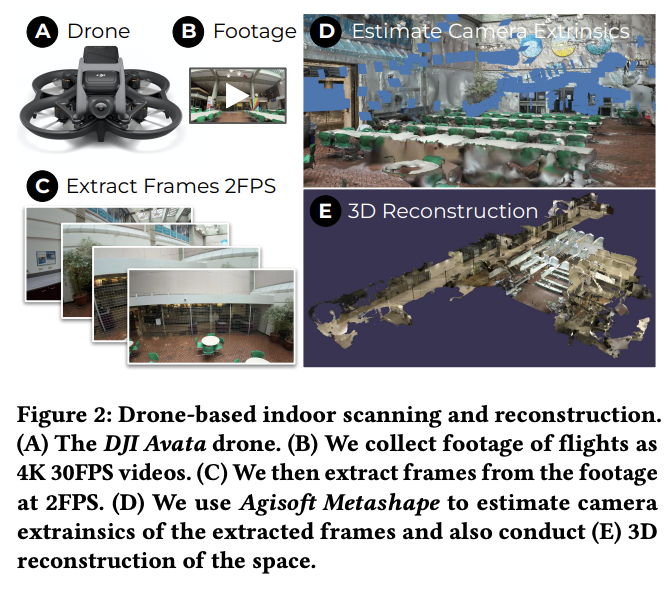
 < How It Was Trained >
< How It Was Trained >


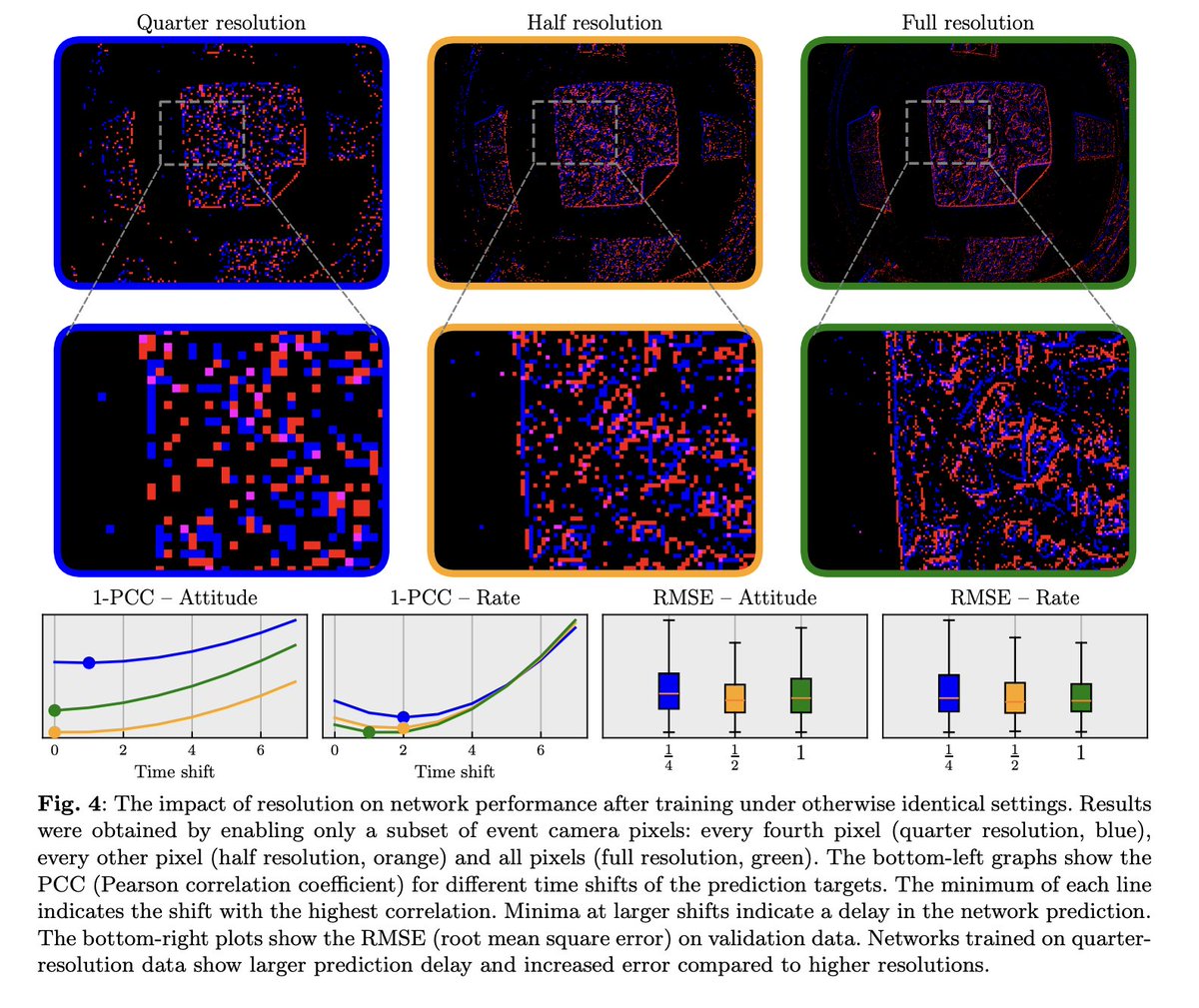
 < Problem >
< Problem > 
 The drone processes a ton of raw data in real time.
The drone processes a ton of raw data in real time.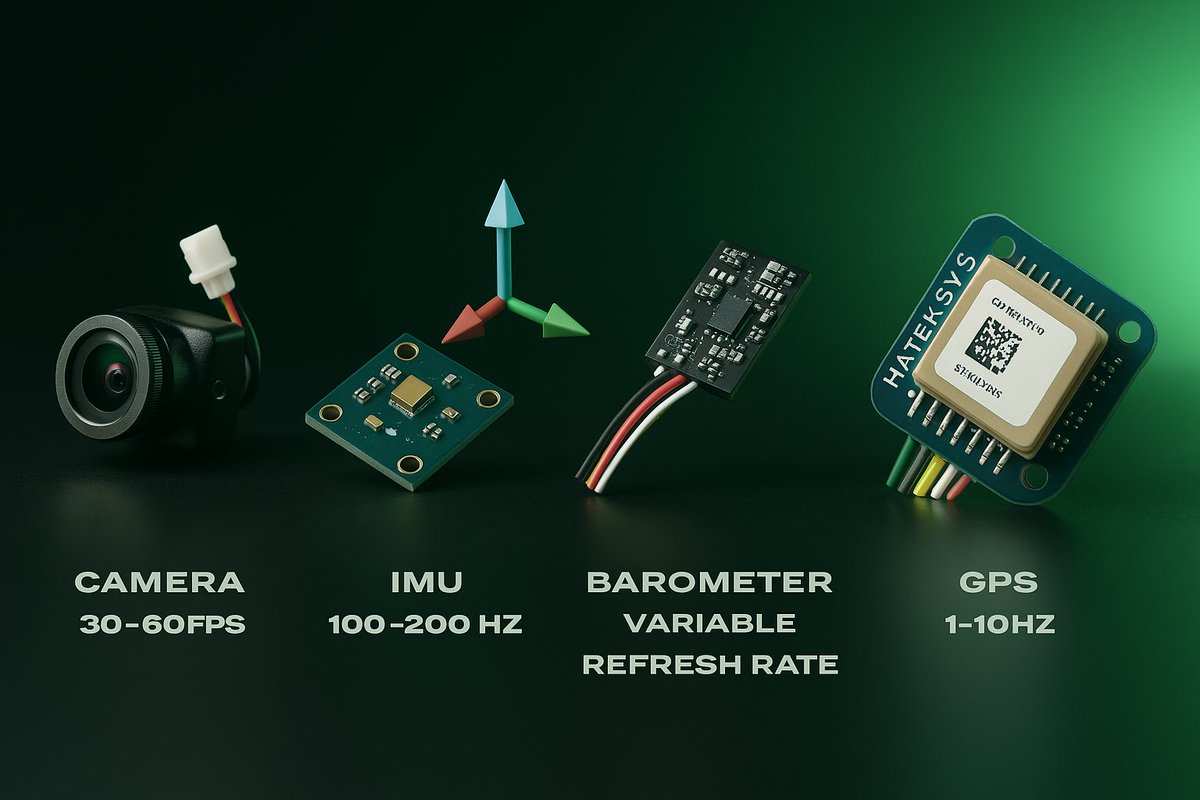
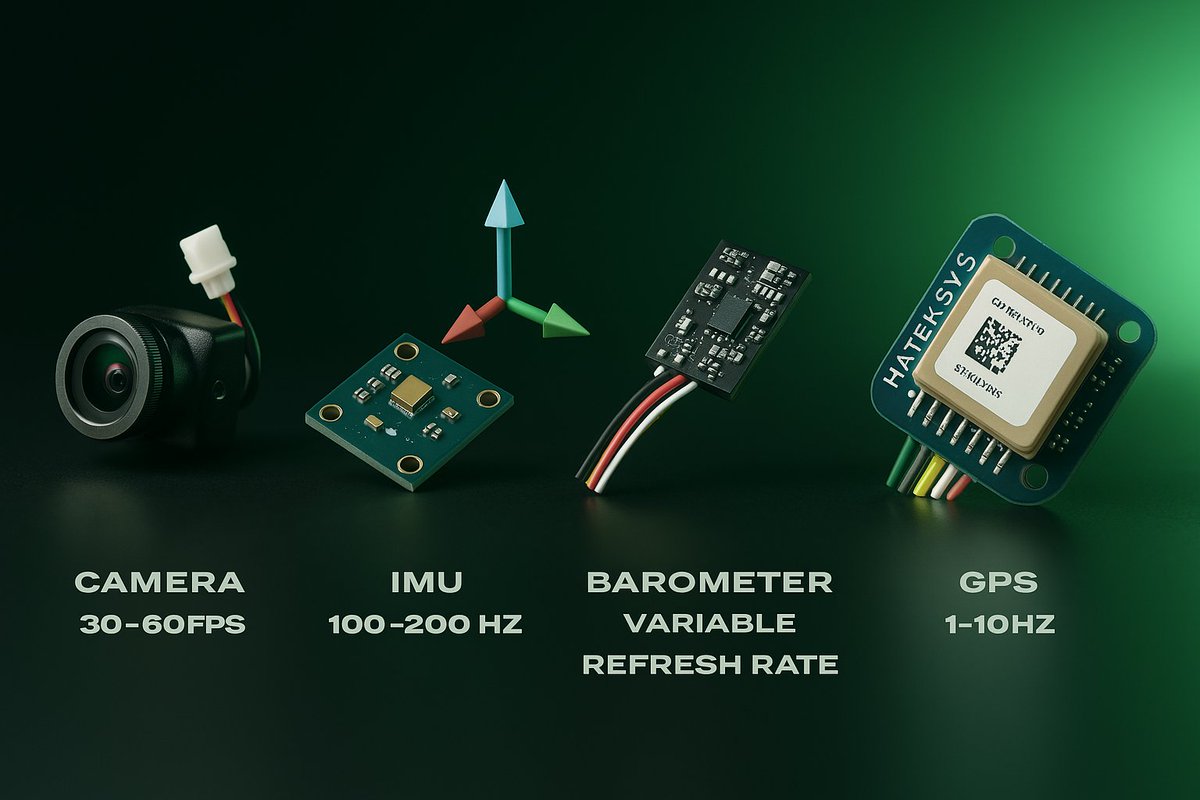
 The Sensor Suite
The Sensor Suite