🧵->
Instead of teleoperation, we train solely on data from our Skill Capture Glove.
The glove is co-designed with Memo's hand, meaning they share the exact same geometry and sensor suite.
If you can do it wearing the glove, Memo can learn it.
Jan 3, 2024 • 7 tweets • 3 min read
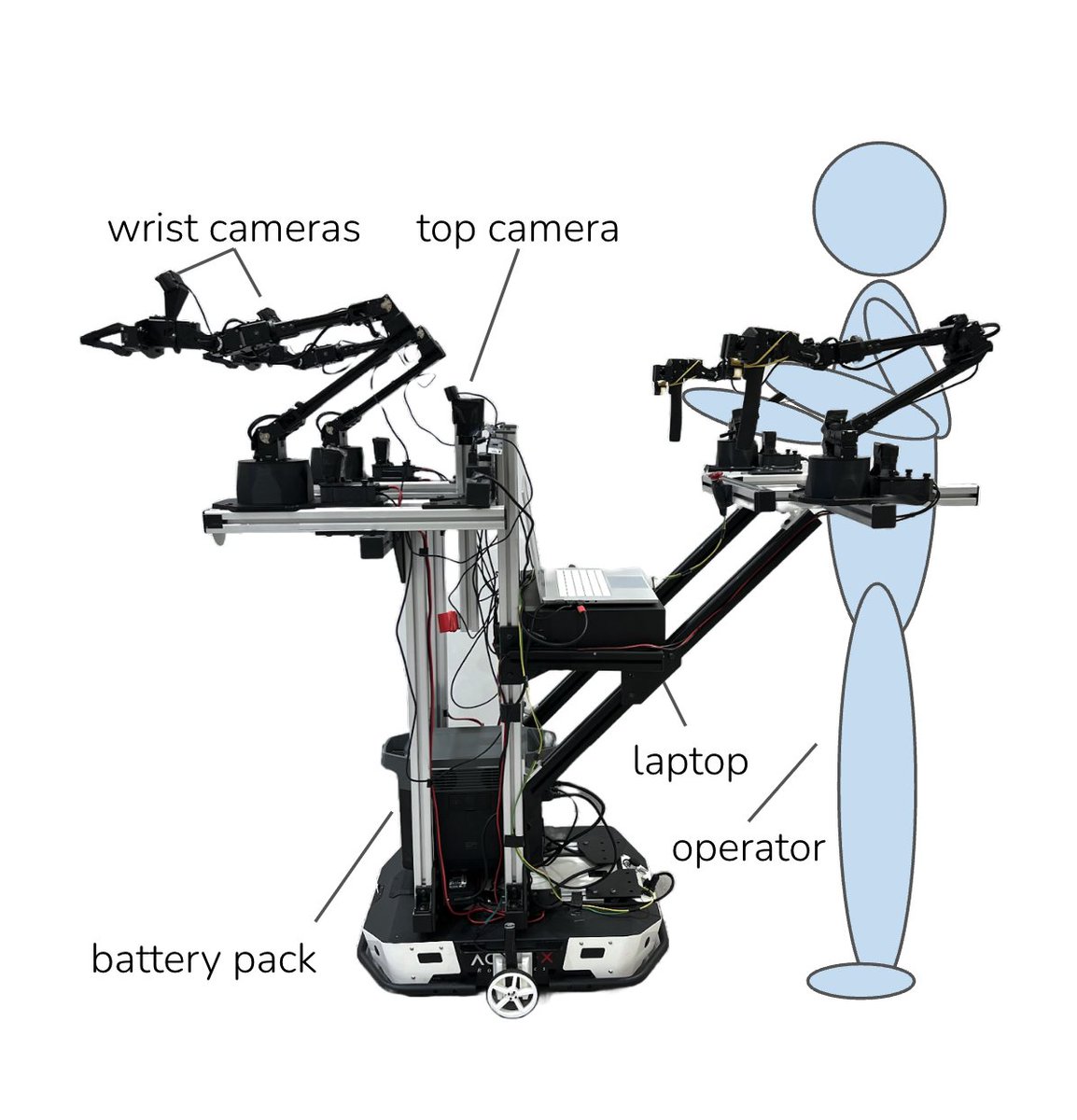
Introducing 𝐌𝐨𝐛𝐢𝐥𝐞 𝐀𝐋𝐎𝐇𝐀🏄 -- Hardware!
A low-cost, open-source, mobile manipulator.
One of the most high-effort projects in my past 5yrs! Not possible without co-lead @zipengfu and @chelseabfinn.
At the end, what's better than cooking yourself a meal with the 🤖🧑🍳
How does 𝐌𝐨𝐛𝐢𝐥𝐞 𝐀𝐋𝐎𝐇𝐀 work? We seek to achieve a few more goals to augment the dexterity of the original 𝐀𝐋𝐎𝐇𝐀:
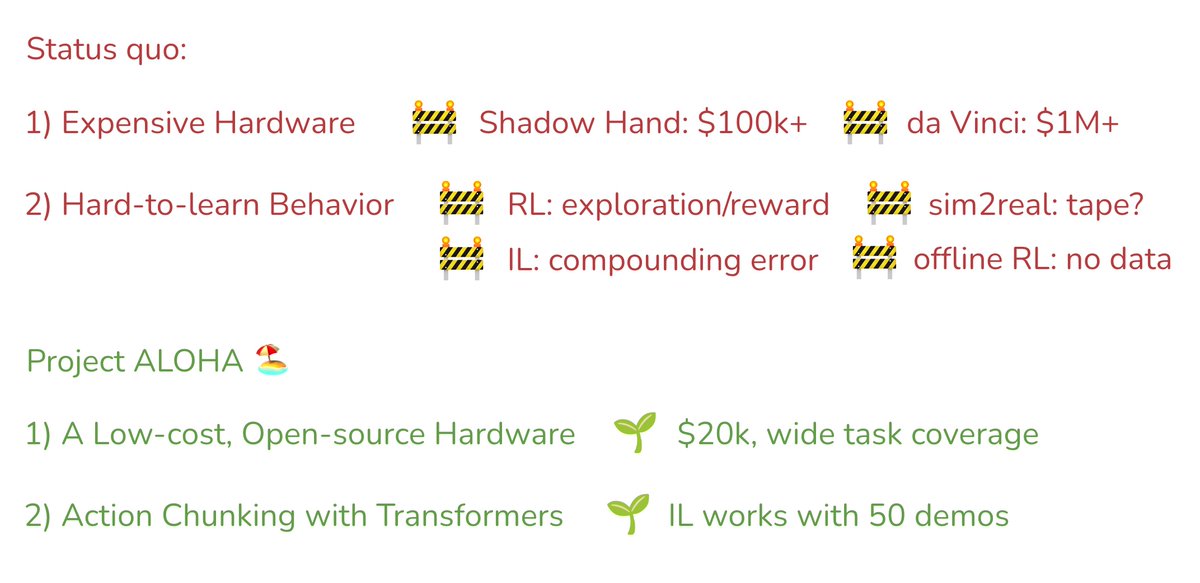
How can robots acquire fine-grained manipulation skills?
Introducing ACT: Action Chunking with Transformers 🤖
Key idea: Imitation, but predict actions in chunks instead of one at a time.
Here are results with only ~15min of demonstrations, running on low-cost arms:
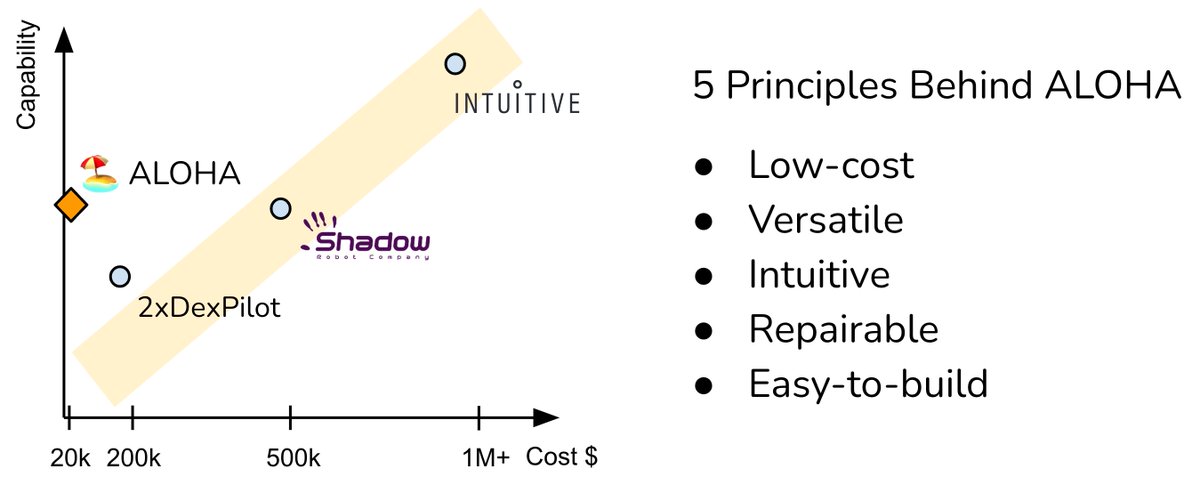
In case you missed ALOHA 🏖, the hardware we use for all these experiments, here is the thread!