How Does a Self-Driving Car Work? 🔧 🧠 🚙
This is classical self-driving car software stack. Nowadays, all steps in the pipeline are dominated by machine learning.
Read below for details on each step 👇
This is classical self-driving car software stack. Nowadays, all steps in the pipeline are dominated by machine learning.
Read below for details on each step 👇

Sensors 🎥
There are 3 main sensors for environment perception 360° around the car:
▪️ Cameras
▪️ Lidars
▪️ Radars
Each sensor has different advantages and disadvantages, so combining all 3 is the best strategy to achieve maximum robustness.
There are 3 main sensors for environment perception 360° around the car:
▪️ Cameras
▪️ Lidars
▪️ Radars
Each sensor has different advantages and disadvantages, so combining all 3 is the best strategy to achieve maximum robustness.

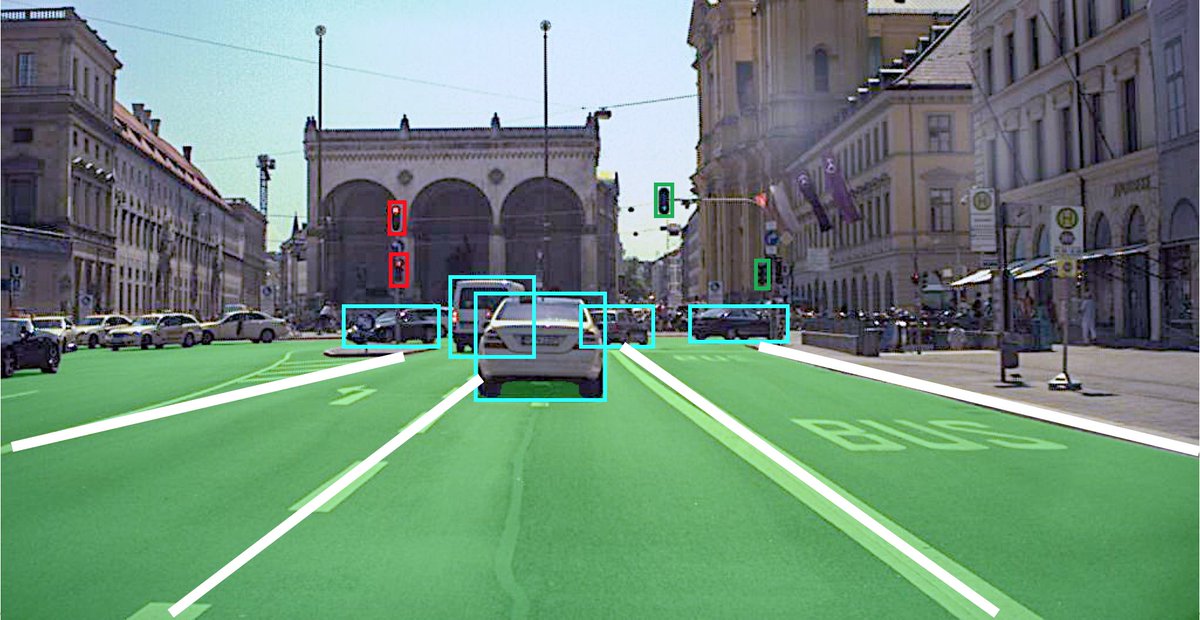
Perception 🖼️
The perception module processes all the sensor raw data to detect different objects, drivable space, lane boundaries, measure distance etc.
Fusing the information from different sensors usually increases the quality of the data significantly.
The perception module processes all the sensor raw data to detect different objects, drivable space, lane boundaries, measure distance etc.
Fusing the information from different sensors usually increases the quality of the data significantly.
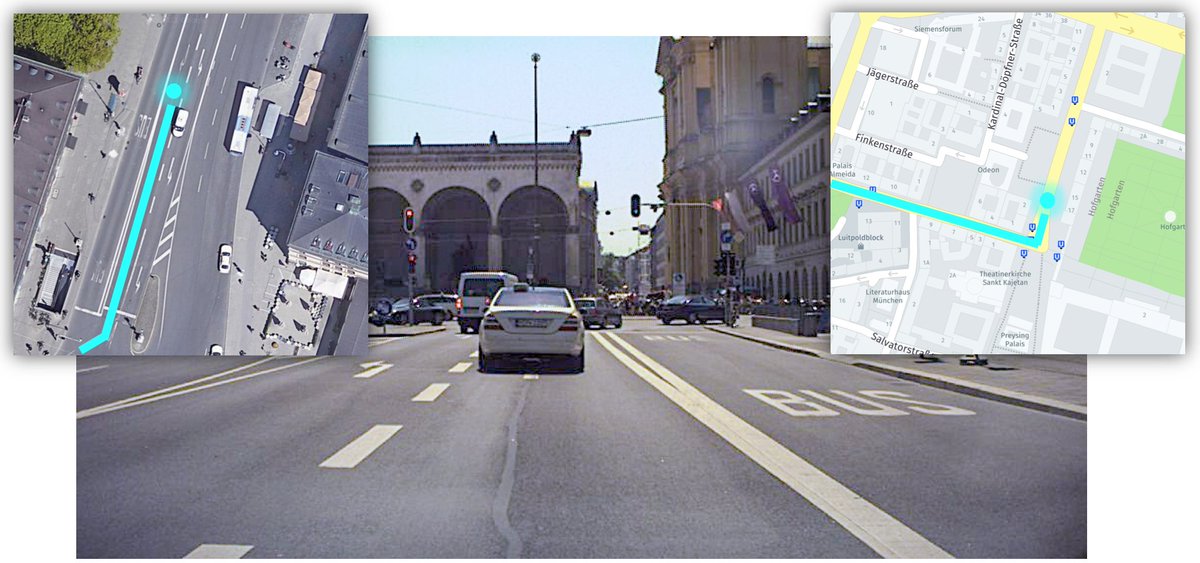
Localization 🗺️
Most self-driving cars use a HD map. The map provides information about the geometry of the road, traffic rules and position of interesting objects (e.g. traffic lights).
Localization in the map is done using GPS and landmarks detected by the sensors.
Most self-driving cars use a HD map. The map provides information about the geometry of the road, traffic rules and position of interesting objects (e.g. traffic lights).
Localization in the map is done using GPS and landmarks detected by the sensors.
Prediction 🔮
The goal of this module is to predict the actions and trajectories of other traffic participants.
Will the car in front break?
Will the car cut in front of me?
Will the pedestrian cross the street?
This is crucial for the car to plan its own trajectory!
The goal of this module is to predict the actions and trajectories of other traffic participants.
Will the car in front break?
Will the car cut in front of me?
Will the pedestrian cross the street?
This is crucial for the car to plan its own trajectory!

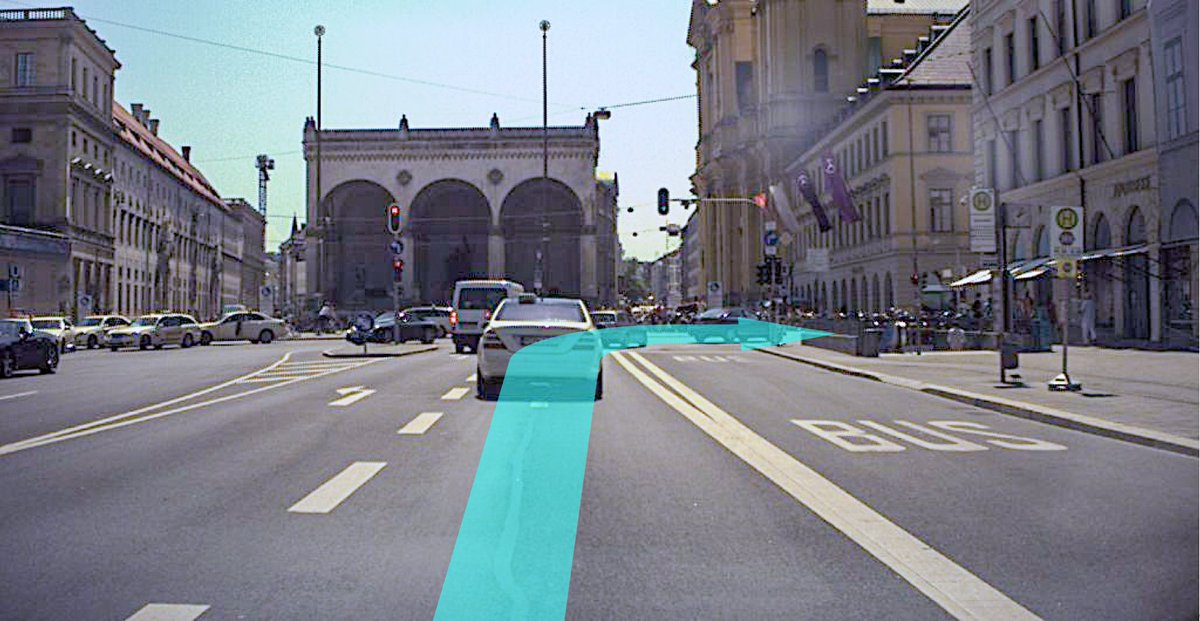
Planning 🔀
In this step the car plans its own trajectory and actions. It needs to consider all other traffic participants, their intentions and the surrounding infrastructure.
One of the main objectives when planning is to maximize safety, but also to drive naturally.
In this step the car plans its own trajectory and actions. It needs to consider all other traffic participants, their intentions and the surrounding infrastructure.
One of the main objectives when planning is to maximize safety, but also to drive naturally.
Control 🚙
The final step is controlling the throttle, breaks and steering so that the car actually drives the planned trajectory.
Here, it is important to have a smooth and natural control and not a steering wheel that twitches all the time.
The final step is controlling the throttle, breaks and steering so that the car actually drives the planned trajectory.
Here, it is important to have a smooth and natural control and not a steering wheel that twitches all the time.

If you liked this thread and want to read more about self-driving cars and machine learning give me a follow! 👍
I have many more threads like this planned 😃
I have many more threads like this planned 😃
• • •
Missing some Tweet in this thread? You can try to
force a refresh