Learning to play Kuhn Poker with Monte Carlo Counterfactual Regret Minimization (MC-CFR) in #python
📝 Code/Tutorial: nn.labml.ai/cfr/index.html
This isn't deep learning. But it'll be interesting if you do machine learning, like incomplete information games or play #poker.
🧵👇
📝 Code/Tutorial: nn.labml.ai/cfr/index.html
This isn't deep learning. But it'll be interesting if you do machine learning, like incomplete information games or play #poker.
🧵👇
2/8) Kuhn Poker is a simple 2-player betting game with three cards (A, K, Q). A single card is dealt to each player. Players take turns betting chips and the player with the higher card wins the chips. If a player folds the other player wins the chips.
👇
👇

3/8) CFR finds the Nash equilibrium with self-play. In each iteration, it calculates the regret of following the current strategy instead of playing each action. Then it updates the strategy with regret matching:
strategy = regret of action/total regret of all actions
👇
strategy = regret of action/total regret of all actions
👇
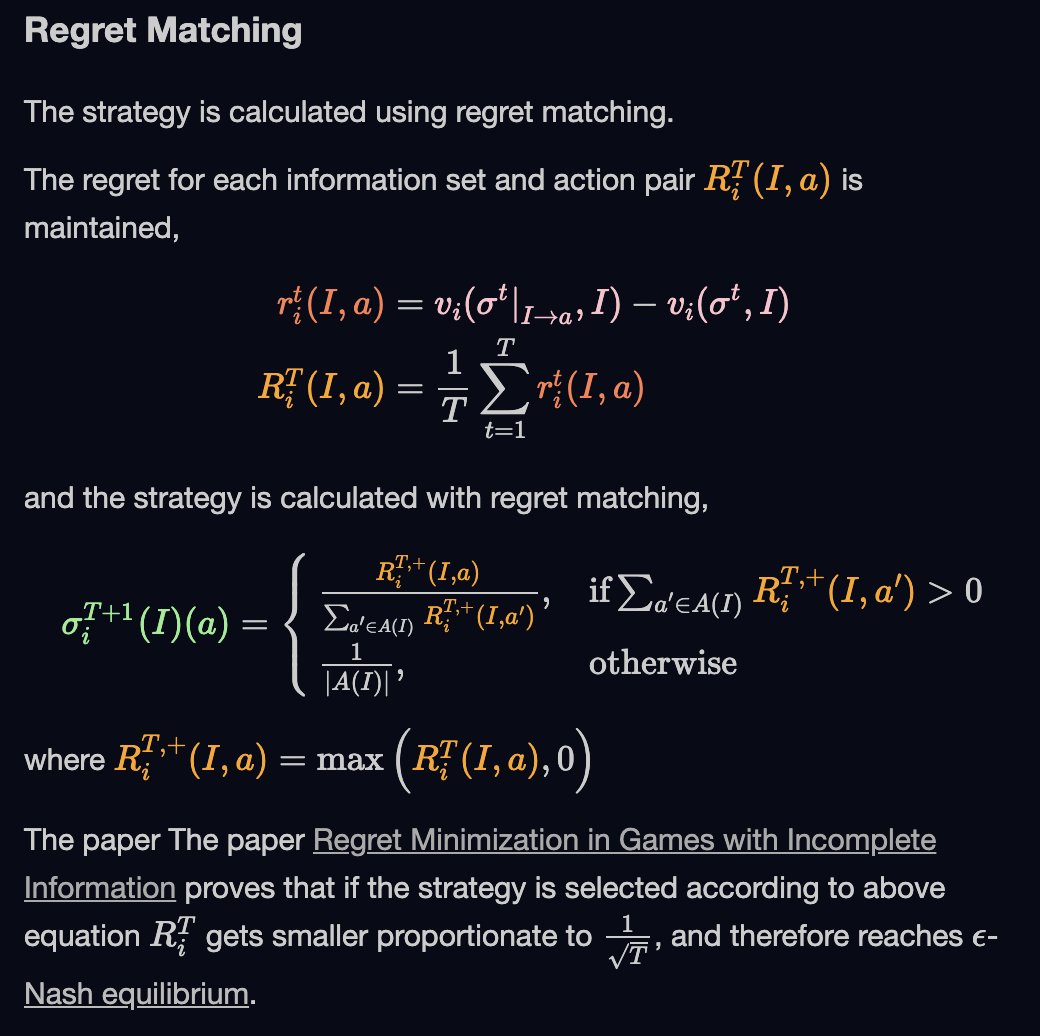
4/8) The average of the strategies throughout the iterations gets close to the Nash equilibrium as we iterate.
Nash equilibrium is a state where no player can increase their expected payoff by changing their strategy.
👇
Nash equilibrium is a state where no player can increase their expected payoff by changing their strategy.
👇



5/8) The strategy is a function of "information set" and gives a probability distribution across actions. An "information set" is the state of the game that’s visible to the player.
👇
👇


6/8) Our implementation is accompanied by a lengthy introduction to CFR and MCCFR. The MCCFR implementation is abstracted from the game Kuhn Poker and we will add Leduc Poker implementation soon.
👇
👇
7/8) Here’s the Kuhn Poker experiment: nn.labml.ai/cfr/kuhn/index…
Colab Notebook with some visualizations:
colab.research.google.com/github/lab-ml/…
Results in @weights_biases:
wandb.ai/vpj/kuhn_poker…
👇
Colab Notebook with some visualizations:
colab.research.google.com/github/lab-ml/…
Results in @weights_biases:
wandb.ai/vpj/kuhn_poker…
👇
8/8) This implementation is based on a tutorial @vpj wrote about a year ago:
github.com/vpj/poker/blob…
We will add implementations for Leduc poker and more efficient variants of CFR such as public chance sampling (PCS) if you find it useful.
github.com/vpj/poker/blob…
We will add implementations for Leduc poker and more efficient variants of CFR such as public chance sampling (PCS) if you find it useful.

• • •
Missing some Tweet in this thread? You can try to
force a refresh