
There is a beautiful way to derive the famous Euler’s formula!
In this🧵, I’ll explain a visual, intuitive derivation. It’ll fit into a single picture at the end.
#iteachmath #MTBoS #math #maths #Mathematics
In this🧵, I’ll explain a visual, intuitive derivation. It’ll fit into a single picture at the end.
#iteachmath #MTBoS #math #maths #Mathematics

This is Thread 3 in a series, but don't worry! This thread is self-contained.
In Thread 1, we saw applications of a mass on a spring.
We solved for its future position, at time 𝑡. This led to 𝑒^(𝑖𝑡), but 𝑖 is "imaginary."
The position along the ground had to be “real,” so we sought to interpret 𝑒^(𝑖𝑡) in terms of real numbers.
We solved for its future position, at time 𝑡. This led to 𝑒^(𝑖𝑡), but 𝑖 is "imaginary."
The position along the ground had to be “real,” so we sought to interpret 𝑒^(𝑖𝑡) in terms of real numbers.
In Thread 2, we tackled the exponent 𝑖𝑡. Before simplifying, it had the form 𝑥+𝑖𝑦. We placed 𝑥+𝑖𝑦 at
(𝑥, 𝑦) in the plane. Then we realized
𝑖 = 0+ 𝑖1
=> 𝑖 is the unit along the y-axis, located at (0, 1)
(𝑥, 𝑦) in the plane. Then we realized
𝑖 = 0+ 𝑖1
=> 𝑖 is the unit along the y-axis, located at (0, 1)

We also found that multiplying by 𝑖 amounts to rotating by +90°. In particular, multiplying 𝑡 by 𝑖 yields 𝑖𝑡 on the y-axis.

So, we know what 𝑖𝑡 looks like. Now, we’ll tackle 𝑒^(𝑖𝑡) as a whole: what does 𝑒^(𝑖𝑡) look like?
We expect 𝑒^(𝑖𝑡) to be a "complex" number 𝑥+𝑖𝑦. After all, complex numbers include all numbers we know, including 𝑒, 𝑖, and 𝑡.
We expect 𝑒^(𝑖𝑡) to be a "complex" number 𝑥+𝑖𝑦. After all, complex numbers include all numbers we know, including 𝑒, 𝑖, and 𝑡.

As 𝑡 is the only variable in 𝑒^(𝑖𝑡), 𝑥 and 𝑦 depend on 𝑡:
𝑒^(𝑖𝑡) = 𝑥(𝑡)+𝑖𝑦(𝑡).
So, 𝑒^(𝑖𝑡) is located at the point (𝑥(𝑡), 𝑦(𝑡)). Since 𝑡 represents time, this is a moving point. What path will it take?
𝑒^(𝑖𝑡) = 𝑥(𝑡)+𝑖𝑦(𝑡).
So, 𝑒^(𝑖𝑡) is located at the point (𝑥(𝑡), 𝑦(𝑡)). Since 𝑡 represents time, this is a moving point. What path will it take?
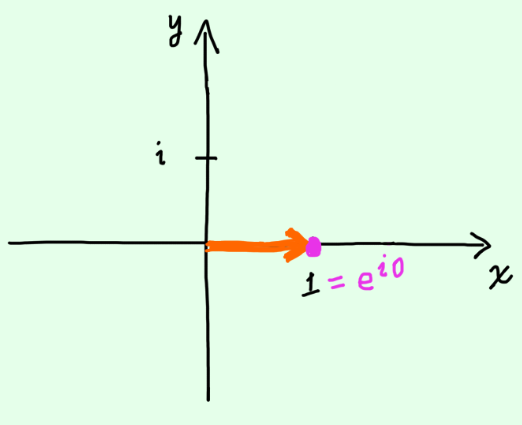
We could try to plot (𝑥(𝑡), 𝑦(𝑡)) for many values of 𝑡, but we only know how to find 𝑒^(𝑖𝑡) when the exponent is real. That only happens at t=0. Then we get
=𝑒^(0)
=1
=1+0𝑖.
So, (1, 0) is the initial point.
=𝑒^(0)
=1
=1+0𝑖.
So, (1, 0) is the initial point.
Fortunately, one point is enough!
Calculus lets us plot curves without a table of points: we calculate the direction, to anticipate where our starting point will move next.
In other words, we calculate the derivative.
Calculus lets us plot curves without a table of points: we calculate the direction, to anticipate where our starting point will move next.
In other words, we calculate the derivative.
Specifically,
(𝑥(𝑡), 𝑦(𝑡)) is the position at time 𝑡
(𝑥′(𝑡), 𝑦′(𝑡)) is the velocity, which gives the direction
How can we calculate the velocity? Our approach all along has been to calculate with 𝑖 as if it's real…
(𝑥(𝑡), 𝑦(𝑡)) is the position at time 𝑡
(𝑥′(𝑡), 𝑦′(𝑡)) is the velocity, which gives the direction
How can we calculate the velocity? Our approach all along has been to calculate with 𝑖 as if it's real…

This is fine.
As Herodotus apparently learned from his travels in Persia, it's often a good strategy to...
deliberate while drunk,
decide while sober.
We're in the drunken discovery phase right now. If we are so inclined, we can make definitions and apply modern rigor later.
As Herodotus apparently learned from his travels in Persia, it's often a good strategy to...
deliberate while drunk,
decide while sober.
We're in the drunken discovery phase right now. If we are so inclined, we can make definitions and apply modern rigor later.
For real r, the derivative of e^(rt) is re^(rt). That is, u=e^(rt) grows exponentially, at a rate proportional to the amount: u'=ru.
So, differentiating e^(rt) amounts to multiplying by r. If we treat 𝑖 the same way, differentiating e^(𝑖t) amounts to multiplying by 𝑖.
So, differentiating e^(rt) amounts to multiplying by r. If we treat 𝑖 the same way, differentiating e^(𝑖t) amounts to multiplying by 𝑖.
Remember, multiplying by 𝑖 causes a rotation by +90°. Hence, the velocity is obtained by rotating the position +90°.
Beautiful! It’s so much simpler than we would’ve initially guessed.
Can you guess the path that the moving point will follow?
Beautiful! It’s so much simpler than we would’ve initially guessed.
Can you guess the path that the moving point will follow?

It’s a circle! The unit circle, to be precise.
Now, if only we knew formulas for a point moving around the unit circle…
Now, if only we knew formulas for a point moving around the unit circle…

We know this from trigonometry:
(x(t), y(t)) = (cos(t), sin(t)).
(This assumes unit speed, but we’re safe. Each velocity vector is obtained by rotating a position vector of a point on the unit circle. Each position vector has length one, so the velocity vectors must as well.)
(x(t), y(t)) = (cos(t), sin(t)).
(This assumes unit speed, but we’re safe. Each velocity vector is obtained by rotating a position vector of a point on the unit circle. Each position vector has length one, so the velocity vectors must as well.)
We’ve done it!
We’ve determined that 𝑒^(𝑖𝑡) is located at
(cos(𝑡), sin(𝑡)).
It follows that
𝑒^(𝑖𝑡) = cos(𝑡)+𝑖 sin(𝑡)
This is Euler’s formula.
We’ve determined that 𝑒^(𝑖𝑡) is located at
(cos(𝑡), sin(𝑡)).
It follows that
𝑒^(𝑖𝑡) = cos(𝑡)+𝑖 sin(𝑡)
This is Euler’s formula.

Now that we understand the pieces, we can understand the entire derivation with a picture!

Notes:
I learned of Herodotus from @viktorblasjo:
I learned a version of this derivation years ago, on Reddit:
reddit.com/r/math/comment…
You can read all three threads in this series by starting here:
I learned of Herodotus from @viktorblasjo:
https://twitter.com/viktorblasjo/status/1413909982504960008
I learned a version of this derivation years ago, on Reddit:
reddit.com/r/math/comment…
You can read all three threads in this series by starting here:
https://twitter.com/HigherMathNotes/status/1508039001021693955
I share math explainers regularly, so if you enjoyed this, follow me for more!
• • •
Missing some Tweet in this thread? You can try to
force a refresh





