,
59 tweets,
25 min read
Read on Twitter
از طوفان صحرا به این سو شلیک موشکهای کروز تاماهاک به اهدافی در هزاران کیلومتر دورتر عنصرثابت نبردهای ایالات متحده بوده است.تاماهاک با بردی معادل 2500 کیلومتر وسرجنگی نیم تنی اش می تواند با دقت چندمتربه هدف اصابت کند. نگاهی می اندازم به چالش ناوبری (ترکام) چنین سلاحی.(55/1)
برخلاف تصور، اولین تلاشهابرای ساخت موشک کروزقدمتی تقریبا برابر با هواپیما دارد و ریشه اش به کترینگ باگ نوعی بمب پرنده در جنگ جهانی اول می رسد که با سرعت 80 کیلومتربرساعت با استفاده از جایروسکوپ هدایت می شدو250 کیلوسرجنگی را به 120 کیلومتری می رساندکه هرگزدرجنگ استفاده نشد.(55/2)
کترینگ باگ از ژیروسکوپ برای حفظ تعادل و یک ارتفاع سنج فشاری استفاده می کرد. برای تشخیص محل اصابت به هدف بر اساس سرعت هوایی، با در نظر گرفتن سرعت و جهت باد تعداد ثابتی از گردشهای پروانه موتورمحاسبه و درآن تنظیم می شد که موتورراخاموش وبالها را جدا می کرد تابه زمین بخورد.(55/3) 


این ترکیب ژیروسکوپ،ارتفاع سنج(وقطبنما)عنصرثابت همه کروزهاازآن زمان است.امابرای فهم ناوبری اینرسیایی تصور کنیدکه درحالی که چشمانتان بسته است بادانستن طول قدمتان و شمردن آنهاولمس یک قطبنمامیخواهید به محل مشخصی برسید:هرچقدردورترشویدخطابیشترمی شودواین چالش اصلی هدایت کروزاست.(55/4)

امادقت موشک را باپارامتری به نام CEP اندازه می گیرند که بصورت ساده دایره ای است که نیمی از گلوله/موشکها در آن می خوردند. مثلا موشک وی-1 آلمانی که اولین کروز عملیاتی تاریخ است، CEP معادل 12.5 کیلومتر داشت که فقط به درد زدن هدف بزرگی مثل شهر لندن می خورد.(55/5)


بعد از ج.ج.د، با توجه به محدودیت ذاتی ناوبری اینرسیایی تلاشهای متعددی برای کاهش خطا با استفاده از سیستمهای کمکی انجام شد. از اولین آنها استفاده از رادارزمینی برای رهگیری موشک و صدورفرمان تصحیحی بودکه بردرابه 700کیلومتر محدود کرده ودرمقابل جنگال بسیار آسیب پذیربود.(55/6)



قدم بعدی ناوبری ستاره ای بود که روی موشک عظیم اسنارک بابرد10،000 کیلومتر،طول 20متر ووزن 21 تن استفاده شد تا CEP 31 کیلومتری اینرسیایی آن را کاهش دهد. اسنارک در50هزارپایی بالاتر ازلایه های ابرو با سرعت نزدیک به یک ماخ پروازمی کرد وصدالبته درآن ارتفاع هدف راداری آشکاری بود.(55/7)


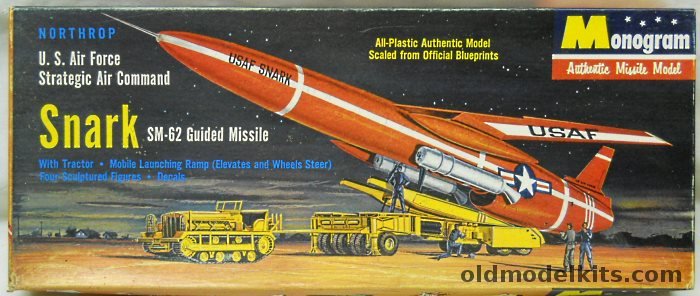
اسنارک یک شکست عملیاتی بود و در موفق ترین آزمون اش نتوانست از 7.5 کیلومتری به هدف نزدیکتر شودواصلا قابل اطمینان نبود: لاشه یکی از موشکها که در 1956 در نزدیکی پوتوریکو ازکنترل خارج شده بوددر1982 درجنگلهای بارانی برزیل پیدا شد!نتیجه:این نقش به بالستیکهاواگذارشد.(55/8)

علت اش ساده است: خطای اینرسیایی با زمان اضافه می شود ودر موشک بالستیک هدایت برای کل یک مسیر 5000 کیلومتری فقط در 20 دقیقه ابتدای مسیر صورت می پذیرد درحالیکه طی همین مسافت برای کروز زیرصوت به 6 ساعت هدایت فعال احتیاج دارد که خطای انباشته شده را حدود 100 برابر می کند.(55/9)


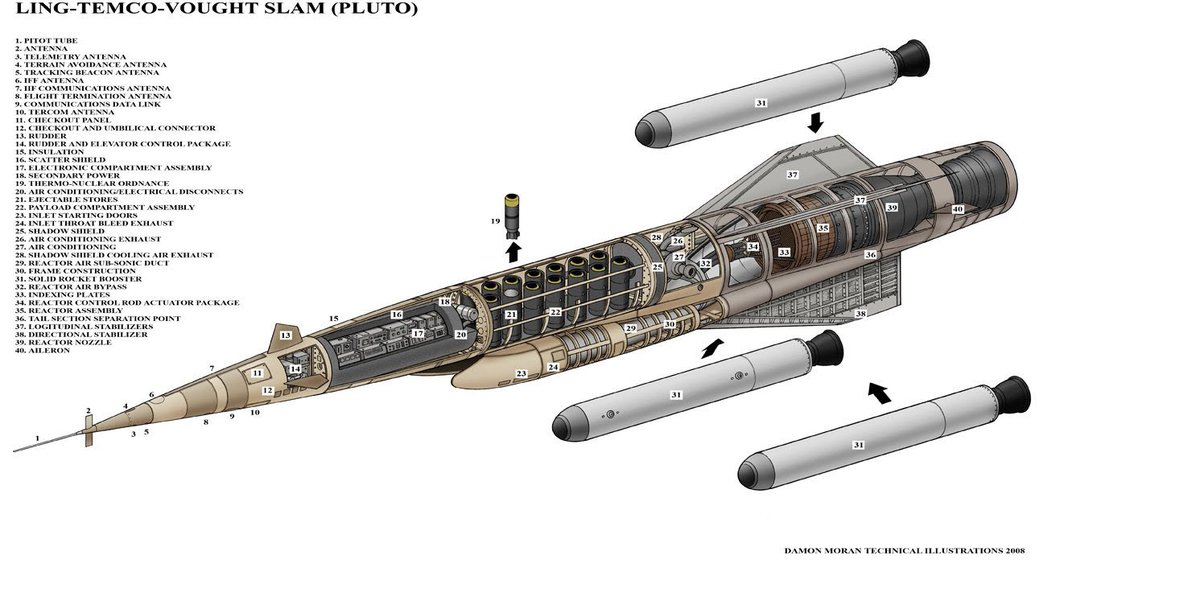
راه حل واقعی در 1958 ودرحین طراحی پهپاد بمب افکن-آخرالزمان-اسلم که موتورش راکتوری هسته ای و دارای بردنامحدود بود به ذهن یکی از مهندسان به نام ویلیام هالمارک رسید.اسلم بایدباسرعت سه ماخ ودرارتفاع بسیارپایین - جهت گریز از رادار- پرواز می کرد که (55/10)

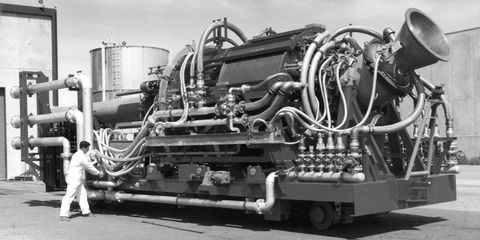
هدایت از راه دور یا ناوبری ستاره ای را غیر ممکن می کرد. به علاوه اسلم باید با16 کلاهک هسته ای با مکانیزمی شبیه صندلی پران به 16 هدف متفاوت حمله می کرد که نیازمند ناوبری پیچیده و دقیق بود.(55/11)
هلمارک به این ایده رسید که هر برشی از نقشه توپوگرافیک زمین مثل اثر انگشت شکل منحصر به فردی دارد و اگر بتوان این براش را با یک نقشه دیجیتال در حافظه مقایسه کرد، می توان مکان دقیق موشک را بر روی زمین یافت و خطای سیستم ناوبری را تصحیح کرد.(55/12)

این سیستم را تطبیق عوارض زمینی یا همان ترکام می نامند.اما دقیقا چطور کار می کند؟می دانیم که فشارهوابا ارتفاع تغییر می کند و این اجازه می دهد که ارتفاع مطلق پرنده از سطح دریا را با دقت زیاد(چند متر) اندازه گرفت. یک رادارارتفاع سنج هم ارتفاع عوارض زیرموشک را اندازه می گیرد.(55/13)
فرض کنید موشک قرار است از عارضه ای مشابه شکل زیر روی خط آبی پرواز کند.آنچه رادارارتفاع سنج موشک در زیر مسیر حرکت آن اندازه می گیردمتوسط فاصله نسبی عوارض از موشک درسلولهای مربعی است که رشته ای از اعداد است که با کسر از ارتفاع مطلق پرنده،ارتفاع آنها از سطح دریا را می دهد.(55/14)
حالا فرض کنید ارتفاع های یک برش منحصر به فرد ازهمین مسیر(قطعه قرمز) از قبل در حافظه موشک ثبت شده باشند و با پرواز از روی این قسمت قرار است بررسی شود که آیا این قسمت از نقشه را می توان بر روی جایی از عوارض زمینی زیر موشک تطبیق داد یا نه.(55/15)
محاسبات باید سبک می بود تا با توان کم پردازشی دهه 60 عملی باشد. از دو یا سه فرمول رایج، MAD یا متوسط قدرمطلق اختلاف ارتفاعها گزینه مطلوب بود. یعنی برش موجوددرحافظه راروی ارتفاعهای اندازه گیری شده لغزانده می شود و هرجاخطاحداقل شد، آنجا تطبیق داده شده و موشک جایش را می یابد.(55/16)
این ایده ی نبوغ آمیز و «تقریبا» عملی با نام «اثرانگشت» علیرغم لغو پروژه اسلم در1959، با قرارداد نیروی هوایی آمریکا برای تحقیق بیشتر به شرکت چنس ووت توسعه یافت و عملی بودن اش با استفاده از سنسورهای موجودهمان زمان در فاصله 1963تا 1965 اثبات شد. (55/17)
تحقیق و توسعه ی این فناوری تحت عناوین مختلف(پهپاد، بالستیک) ادامه داشت تا در 1971 حاصل قرارداد تحقیقاتی نیروی دریایی بادانشگاه جان هاپکینز، ترکام را برای کروزراهبردی توصیه کرد. سپس آنها شرکت ای سیستمز را برای آزمونهای پروازی استخدام کردند که عملی بودن سیستم را اثبات کرد و(55/18)

و ضمن نشان دادن اهمیت بسیار انتخاب مسیر منجر به توسعه تکنیکهای مرتبط با طراحی عملیاتی مسیر موشک کروز شد.در 1974 نیروی دریایی تقاضای پروپوزالی برای هدایت کروز داد که چهار شرکت پاسخ دادند:جنرال داینامیکز و شاخه فضایی مکدانل داگلاس که هر دو با هزینه بخش خصوصی آزمونهایی را(55/19)

بر روی ترکام در سال قبل اش برای آمادگی شرکت در این مناقصه انجام داده بودند به همراه چیس ووت(شرکت اولیه درگیر در پروژه اسلم) و ای-سیستمز. درمناقصه ی کاغذی(ارائه طراحی و فناوری روی کاغذ) مکدانل و ای سیستمز به عنوان دو رقیب برای نمونه سازی، برنده اعلام شدند.(55/20)
در نهایت مکدانل سیستم خود را بر روی یک کویین ایر و ای سیستمز بر روی یک ای-7 ای تست و توسعه دادند. آزمون نهایی بر روی یک سی -141 نیروی هوایی نشان داد که سامانه مکدانل بسیار دقیق تر است و آن شرکت برنده مناقصه سامانه هدایت موشکهای کروز اعلام شد.(55/21)


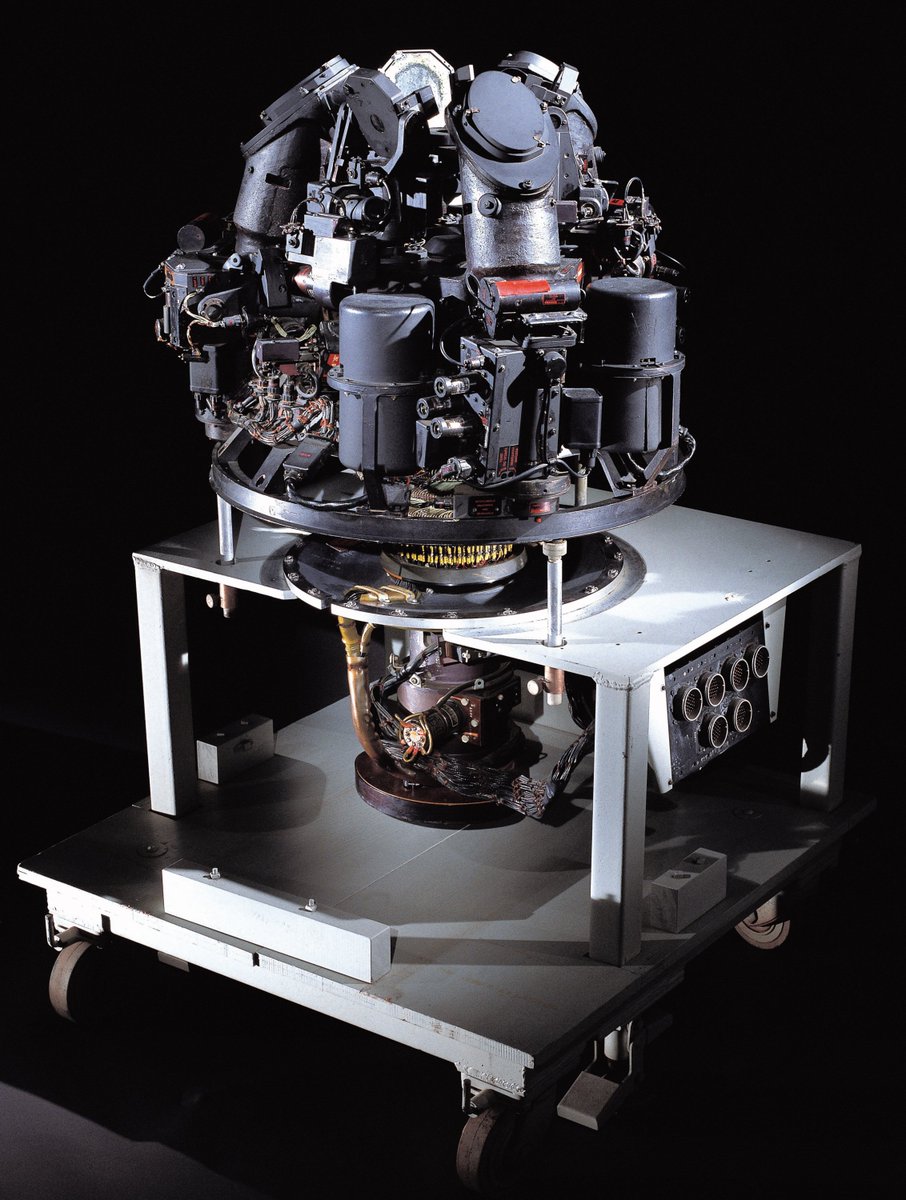
برای درک آنکه چرا پیشتر چنین سامانه ای ممکن نبود: خطای آی ان اس های مورداستفاده در 1958 حدود 0.03 درجه برساعت بودکه دردهه 70به 0.005 و وزن سیستم از 150 به 15 کیلوکاهش یافته بود و این به معنای کاهش خطا از 12 به2 کیلومتر در برد 3000 کیلومتری باسرعت 550 نات بود.(55/22)
همچنین ظهور ریزپردازنده ها و حافظه های حالت جامد هم امکاناتی را فراهم می کرد که پیشتر تصورشان غیرممکن بود. البته چون حافظه کامپیوتر موشک همچنان محدود بود امکان ضبط و بازخوانی نقشه کل مسیر موجود نبود، از همین رو ترکیب ناوبری اینرسیایی و ترکام مورد استفاده قرار میگرفت:(55/23)
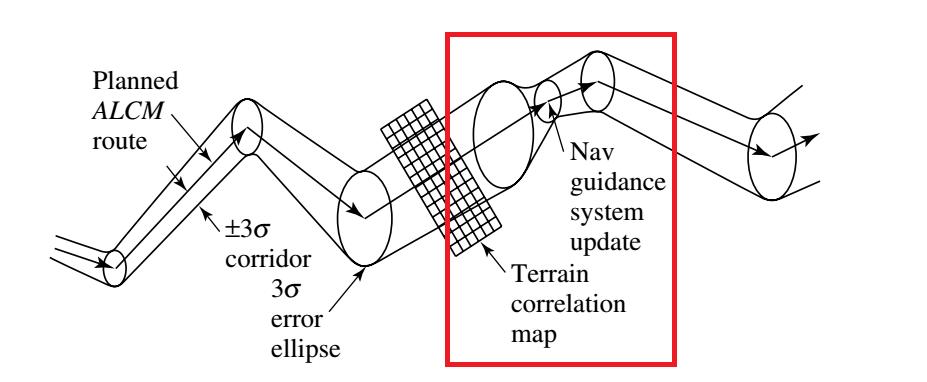
موشک در طول پرواز چندین ساعته اش، هر از چندی با نزدیک شدن به محدوده ای که نقشه اش را دارد چشمانش را بازکرده به عبارت دیگر با استفاده از ترکام جای دقیق خودش را می یابد،خطای ناوبری اینرسیایی را تصحیح کرده و به سمت نقطه مسیر بعدی ادامه می دهد ،(55/24)

. در عمل نقشه شامل چندین نوار ارتفاعی موازی با یکدیگر است که موشک بتواند خطای سمتی خود(چپ و راست رفتن از مسیر اصلی) را نیز تصحیح کند.(55/25)

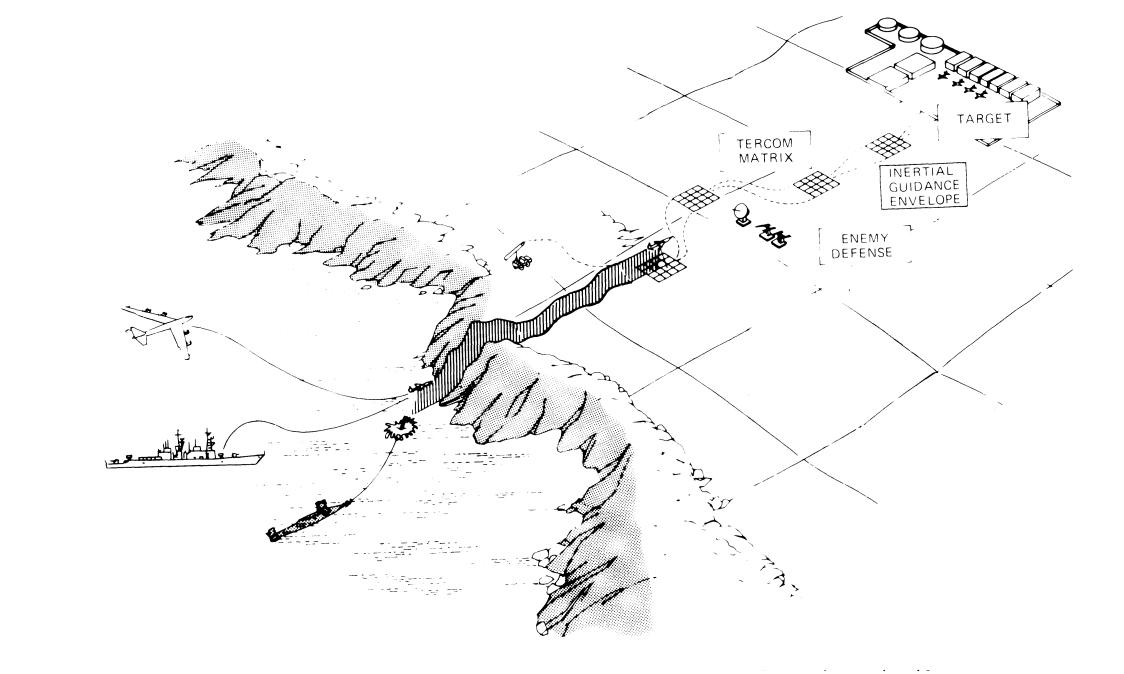
پس از شلیک از کشتی یاهواپیما اولین تطبیق در مرحله ی ورود به خشکی است و با نزدیک شدن به هدف تطابق با فواصل کمتروآخرین تطبیق درفاصله بسیار کم از هدف صورت می پذیرد و البته در قسمت پایان مسیر از تطبیق تصویر یا DSMAC استفاده می شود که درپایان توضیح کوتاهی درباره اش خواهم داد.(55/26)

اما طراحی مسیر ترکام آسان نیست. بزرگترین مشکل زمینهای مسطح مثل جنوب عراق یاعربستان است که برای کیلومترها عارضه جغرافیایی قابل تشخیصی ندارندو بدون دخالت سامانه سوم(مثلا جی پی اس) ترکام درآنهاممکن نیست:کروزهادر طوفان صحرا برای رسیدن به بغداد از کوههای زاگرس عبور می کردند.(55/27)
و دومی وجود عوارض مشابه موازی(زیر) است. برای غلبه براین مشکل هر مرحله تطبیق عوارض با سه تکه نقشه نزدیک به هم اجرا می شود و اگر دو از سه نقشه توانستند در ترکیب با آی.ان.اس موقعیت معقولی را اعلام کنند، خطاهای ناوبری به روز شده وگرنه موشک به سمت محل بعدی ادامه مسیر می دهد.(55/28)

اما برای فهم دقت هدایت ترکام باید محدودیت های نقشه را توضیح داد. نقشه از سلولهای با ابعاد 30 تا 1000 متر ساخته شده که هرکدام متوسط ارتفاع آن نقطه در روی زمین را دارند. ابعاد مسیری که بتوان درآن از منحصر به فرد بودن مقطع مطمئن شد بین 6تا 10 کیلومتر است.(55/29)

دقت رادار ارتفاع سنج+فشاری پیشرفته در حدود 1.5 متر است و برای اطمینان از منحصر به فرد بودن مقطع مسیر مورد مقایسه تنها داشتن پستی و بلندی آن کافی نیست و حداقل واریانس ارتفاع آن باید بیش از 7 متر باشدو نقشه خوب حداقل 20 مترواریانس ارتفاع درطول مقطع دارد.(55/30)
اما مهمترین نکته این رشته توییت درباره قسمتی از ناوبری کروز است که برخلاف موشک و انفجار شما نمی بینید:«سامانه طراحی ماموریت» که عناصر متعددی دارد وبیش از موتور توربوفن کوچک،گلوگاه فناوری کروز است. اولین بخش آن نقشه رقومی ارتفاعی با تفکیک بالا(DEM)وخطای در حد متر است.(55/31)

این نقشه ها توسط ماهواره ها تصویربرداری بصری استریوسکوپیک تهیه می شوند و به دلیل ارزش نظامی به آسانی دردسترس نیستند.بهترین نقشه های رایگان ارتفاعی(مثل SRTM یا ALOS) دقتی حدود 30 متر دارند که برای ترکام بلامصرف هستند.سرویسهای جدید تجاری مثل کوئیک برد یا ورلدویو-3 یا4(55/32)

که به مرحله دقت نظامی رسیده اند(1.5 متر) به شدت کنترل شده اند.تصویربرداری ماهواره ای برای تهیه ی چنان نقشه هایی جایگزین ندارد. گردآوری چنان حجمی از داده با حرکت بر روی زمین (ناصاف مناسب ترکام) عملی نیست و (55/33)

این به جز آن است که برخی روشها مثل جی پی اس(به دلیل خطای ارتفاعی حداقل دوبرابرخطای افقی)مردودهستند. برای درک دشواری دستیابی:گفته می شود یکی از دلایل خریدموشک گرانقیمت ترایدنت توسط بریتانیادرآغاز دهه 80 به جای کروز،امتناع آمریکا از فروش نقشه ها بود.(55/34)

اما طراحی ماموریت به اینجا ختم نمی شود. برای اطمینان از گم نشدن موشک در طول مسیر، مدلهای آماری/احتمالی متعددی را برای شبیه سازی مسیر پرواز و انتخاب نواحی نقشه خوانی به شکلی که مقطع منحصر به فرد با خطر پایین برخورد به زمین را تضمین کند بکار می گیرند.(55/35)

تحلیلگران و امکانات موردنیاز برای طراحی مسیر ترکام آنقدر پیچیده است که طراحی فقط درمراکز خشکی یادر مراکز کنترل نبرد ناوهای هواپیمابر مقدوراست.درنتیجه به غیر ازماموریتهای ازقبل تعریف شده ی دراختیارشناورهای شلیک کننده،طراحی مسیر جدید باید به آنها مخابره ودرموشک بارگذاری شود.(55/36)

نرم افزار هدایت داخلی موشک هم برای ترکیب همه ی منابع داده پیچیدگی های خود را دارد که البته به اندازه ی دشواریهای سامانه طراحی ماموریت گلوگاهی نیست ولی عملیاتی کردن آن به ساعتها آزمون پروازی احتیاج دارد. اما با همه ی این پیچیدگی ها دقت قابل دستیابی ترکام چقدر است؟(55/37)

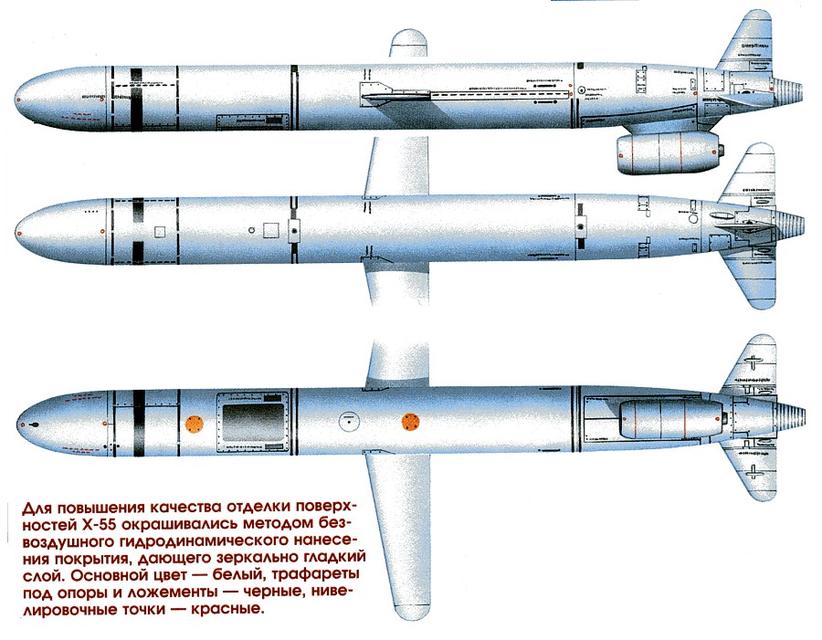
دقت قابل دستیابی فقط با استفاده از ترکام بین 30تا 200 متر گزارش شده است که با توجه به آنکه شعاع فشار 20پی اس آی کلاهک دبیلو-80یکصدوپنجاه کیلوتنی موشک تلم حدود 1.4 کیلومتراست، دقتی عالی است.این رقم برای ترکام موشک خا-55 (با کلاهک 200 کیلوتنی) هم حدود 200 متر گزارش شده است.(55/38)

تنها پارامتر حیاتی برای کروز باکلاهک هسته ای نه دقت مکانی بلکه دقت زمانی (کمتر از 3 ثانیه) رسیدن به هدف در موعد مقرر است. ضرورت این امر ناشی از آن است که در صورت حمله همزمان به چندهدف نزدیک به هم اولین انفجار اتمی، سایر موشکهای همان منطقه را نابود نکند.(55/39)

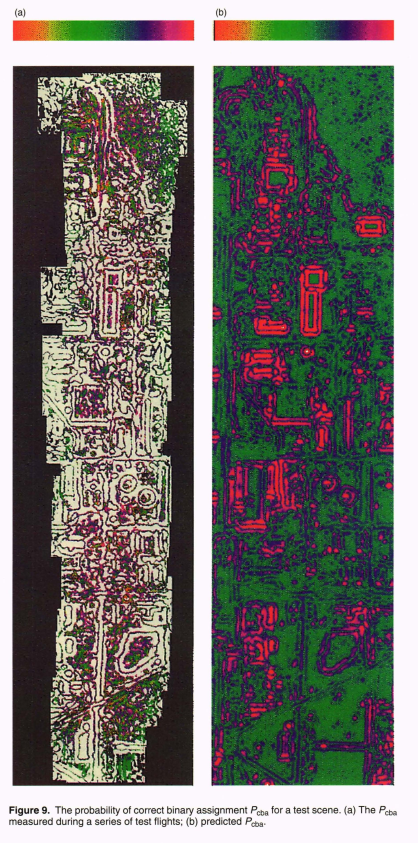
اما این ارقام 30 تا 200 متر برای سرجنگی معمولی 500 کیلویی تاماهاک قابل قبول نیست.اینجاست که نزدیکی هدف سامانه کمکی دیگری برای بهبود دقت درزدن اهداف کوچک واردعمل می شود:DSMAC یا سامانه ی تطبیق تصویری.این سامانه را میتوان نسخه دوبعدی ترکام دانست که البته بسیار پیچیده تر است.(55/40)

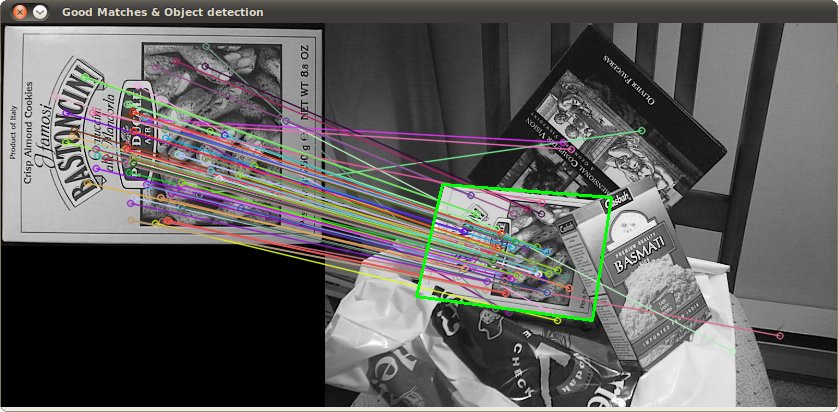
DSMAC از یک دوربین ویدیویی در زیر موشک برای گرفتن تصاویر عمودنگر از منظره زیر موشک استفاده کرده و سپس بعد از تبدیل آنها به تصاویر باینری(نقاط سیاه و سفید) سعی می کند از روی تطبیق دادن آنها با تصاویر موجود در حافظه موقعیت نسبی موشک را نسبت به هدف با دقت چندمتر بیابد.(55/41)

برای درک پیچیدگی بسیار بالاتر DSMAC درمقابل ترکام اجازه بدهیدبه یکی دو موضوع اشاره کنم.اولین آنها انتخاب تصاویر مناسب ازمیان تصاویر هوایی موجود است به شکلی که هم منحصر به فرد بوده وهم همبستگی آماری معناداری بدهند که شامل شبیه سازی یک میلیون تا ده میلیارد تصویر باینزی است.(55/42)

دشواری دیگر آن است که تصاویرشناسایی معمولاچندین هفته یاماه قبل در روشنایی متفاوتی از شرایط عملیاتی گرفته شده اندو می توانند کاملا به شکل متفاوتی دیده شوند.طراح مسیر با استفاده از مدلهای تحلیلی ریاضی (نه شبیه سازی) باید روشنایی در زمان رسیدن موشک به آن نقطه را پیش بینی کند.(55/43)
خود فرایند تطبیق هم بااستفاده ازفرمول ساده ولی به جهت محاسباتی پرهزینه ی Digital Image Correlation انجام می شودکه به زبان ساده، جابجا کردن مرکز تصویر موجود در حافظه روی تمام نقاط تصویر گرفته شده و محاسبه پارامتر همبستگی و پیداکردن نقطه تطابق است که از حوصله اینجا خارج است.(55/44)

طراحی ماموریت برای DSMAC شامل محاسبات آماری و احتمالی بسیارحجیم وتصحیحات متعدد(از اعوجاج لنز تا زاویه داشتن تصویربا عکس مرجع) برای اطمینان ازآن است که تصاویر قابل یافتن خواهند بودوبخش گلوگاهی فناوری موشک کروز درسامانه طراحی ماموریت است که نیروی متخصص و دانش بالایی می طلبد.(55/45)

هدف محاسبات آن است که بتوان برای هر پیکسل باینری در تصویر مرجع، احتمال رویت آن در زمان واقعی با طیف همسان(صفر یا یک) محاسبه شودتا بتوان از شانس تطابق درحین پرواز اطمینان حاصل کرد.درپایان مسیربعدازچند تطبیق تصویری و جی پی اس، سامانه اینرسیال فرمان حمله آخر را صادر می کند(55/46)
و اما برای فهم آنکه دشواری رساندن CEP 200 متری ترکام به دقت چندمتری به دست آمده توسط DSMAC چقدر است بگذارید دو مثال بزنم:درجنگ اول خلیج فارس،طراحان ماموریت باتوجه به الگوی خاص و به آسانی قابل تشخیص تقاطع بزرگراههای منتهی به بغداد از آنهابه عنوان تصویر مرجع استفاده کردند.(55/47)


عراقی ها باکشف عبورمکرر تاماهاک ها ازاین نقاط با قراردادن توپهای ضدهوایی موفق به شکار برخی ازتاماهاک ها شدند.دومین مثال: توسعه موشک خا-101 روسی که نسخه ی غیرهسته ای خا-55 است واز ناوبری ماهواره ای گلوناس درترکیب باپردازش تصویراستفاده می کندازدهه 80 میلادی تا2012 طول کشید.(55/48)
البته هدایت ماهواره ای جز لاینفک موشکهای کروز قدرتهای بزرگ است ولی علت آن،اطمینان آنها ازتوانایی برقراری وحفظ دسترسی به سیگنال هدایت ماهواره ای است ولی این امر برای دیگران صادق نیست:مثلا JASSM آمریکایی برای هدایت طول مسیر منحصرا متکی به جی پی اس است ولی استورم شدو (55/49)

از ترپرام در کنار اینرسیایی،DSMAC وجی پی اس استفاده می کندکه نشان می دهدانگلیسی وفرانسوی ها نمی تواننداز دسترسی دایمی به سیگنال جی پی اس درشرایط جنگی مطمئن باشند.پیشرفتهای الکترونیک/کامپیوتر، امکانات خارق العاده و غیر قابل تصوری را فراهم کرده اند که ترپرام یکی از آنهاست.(55/50)

در ترپرام نقشه ارتفاعی مقاطع محدوده ای به ابعاد نیم میلیون کیلومتر مربع درحافظه موشک قراردارد که با کمک آن در کل مسیر ودر همه ی لحظات پروازی موقعیت اش را تشخیص دهد و نمونه وضوح پایین اش برای بهبود ایمنی پروازهای تجاری در حال توسعه است.(55/51)
سایرپیشرفتهاشامل چیزهایی می شوند که ما درباره ی آنها بسیار اندک می دانیم. مثل توانایی گشت زنی و حمله به اهداف متحرک. یکی ازقدیمیترین آنها پرواز جمعی کروزهاست که اینجا صحنه ای از آن را که توسط یک جنگنده متحدین در حمله 2003 به عراق گرفته شده می بینیم:(55/52)
یک نکته کوتاه و پایانی درباره DSMAC: تکنیک Image Correlationنیازمند آن است که تصویر از ارتفاع مشخص و با زاویه مشخص گرفته شده باشدتا بتواندباجابجاکردن آن روی تصویر مرجع آن را بیابد. به همین دلیل در موشک بالستیک پرشینگ از 4 نقشه برای ارتفاعهای متفاوت استفاده می شد.(55/53)

اما در15 سال اخیرالگوریتمهای مدرن پردازش تصویری ابداع شده اند که نسبت به چرخش و تغییر ابعاد و زاویه تصویر غیرحساس هستند. پردازنده های فوق سریع و کم مصرف امکان اجرای این این الگوریتمها را بر روی موشکهای کروز گشت زن فراهم می کنند.(55/54)
و اینها احتمالا فناوری مورداستفاده در موشکهایی مثل دلیله برای یافتن خودکار اهداف زرهی، سلاح های ضدهوایی و انهدام آنهاست و اگر عمری باقی بود شاید درباره ی آنها نوشتم.(تمام)

تکمیلی: وقت شما و خودم را با آنچه از روی موشک خا-55 ساخته شده که به عنوان سومار یا هویزه معرفی می شود نمی گیرم. هنوز فیلمی از کروز این موشک موجود نیست و همه تصاویر از پرتاب آن از لانچر توسط بوستر جامدو تا قبل از روشن شدن موتور توربوفن(؟) است. اگر زمانی کروز کرد...
آن وقت می شود پرسید که تاسیسات، تجهیزات وفناوری لازم برای تهیه ی نقشه های ماهواره ای، طراحی ماموریت و آزمونهای پروازی، تصاویر هوایی مورد نیاز از اهداف(نخیر از گوگل ارث نمی شود!) که دست نیافتنی تر از خود موشک هستند، قرار است از کجا بیاید. هدایت جی پی اس برای نیرویی که برتری

هوایی در خاک دشمن ندارد، بلامصرف است (وارد دلایل آن نمی شوم). البته این خارج از دشواری ساخت خود موشک بویژه موتور توربوفن آن است که درنسخه مینیاتوری تامین تلورانس تیغه فن بادیواره وهمچنین خنک سازی پره های توربین(به دلیل افزایش نسبت سطح به حجم) از توربوفن بزرگ دشوارتر است/پایان.


@Hosseini_sh93
در این مدت لطف همگی بویژه دوستان متخصص مثل شما شامل حال من بوده است. ببخشید آن توییت تان بی پاسخ ماند تا خودم را جمع و جور کردم پاسخ دهم رفته بود و بسیار ارادتمندم و جسارتی نبوده. آواتار را هم امروز عوض کردید و کمی یافتن تان دشوار شد! به هر رو ارادت بسیار.
در این مدت لطف همگی بویژه دوستان متخصص مثل شما شامل حال من بوده است. ببخشید آن توییت تان بی پاسخ ماند تا خودم را جمع و جور کردم پاسخ دهم رفته بود و بسیار ارادتمندم و جسارتی نبوده. آواتار را هم امروز عوض کردید و کمی یافتن تان دشوار شد! به هر رو ارادت بسیار.