Sensors for self-driving cars 🎥 🧠 🚙
There are 3 main sensors types used in self-driving cars for environment perception:
▪️ Camera
▪️ Radar
▪️ Lidar
They all have different advantages and disadvantages. Read below to learn more about them.
Thread 👇
There are 3 main sensors types used in self-driving cars for environment perception:
▪️ Camera
▪️ Radar
▪️ Lidar
They all have different advantages and disadvantages. Read below to learn more about them.
Thread 👇
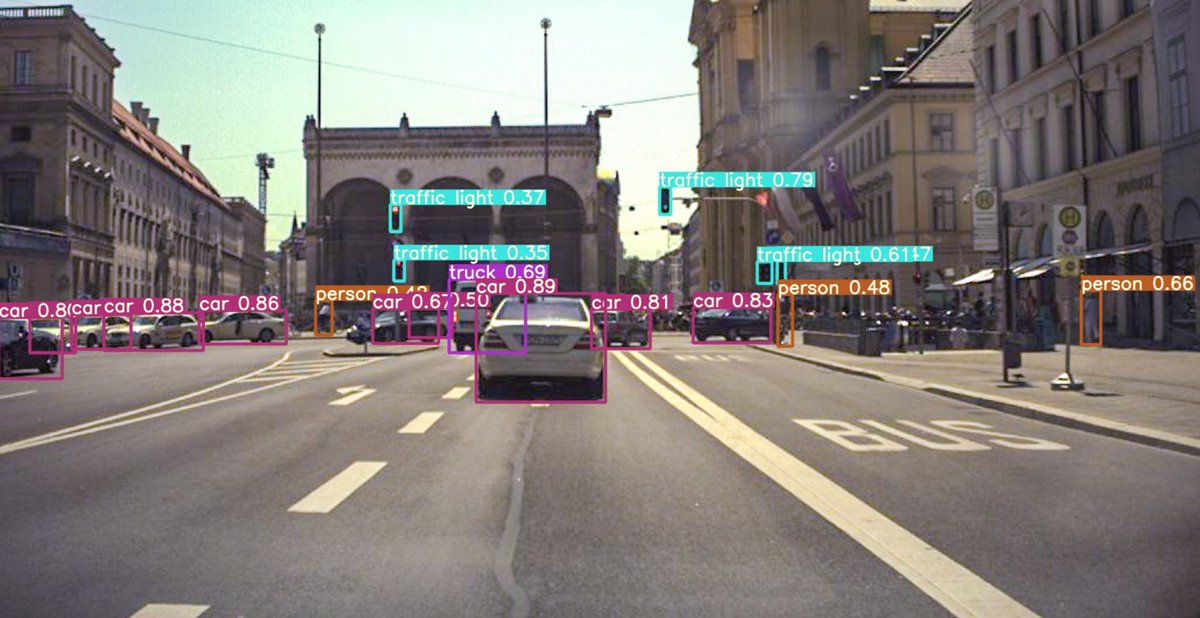
1️⃣ Camera
The camera is arguably the most important sensor - the camera images contain the most information compared to the other sensors.
Modern cars across all self-driving levels have many cameras for a 360° coverage:
▪️ BMW 8 series - 7
▪️ Tesla - 8
▪️ Waymo - 29
The camera is arguably the most important sensor - the camera images contain the most information compared to the other sensors.
Modern cars across all self-driving levels have many cameras for a 360° coverage:
▪️ BMW 8 series - 7
▪️ Tesla - 8
▪️ Waymo - 29



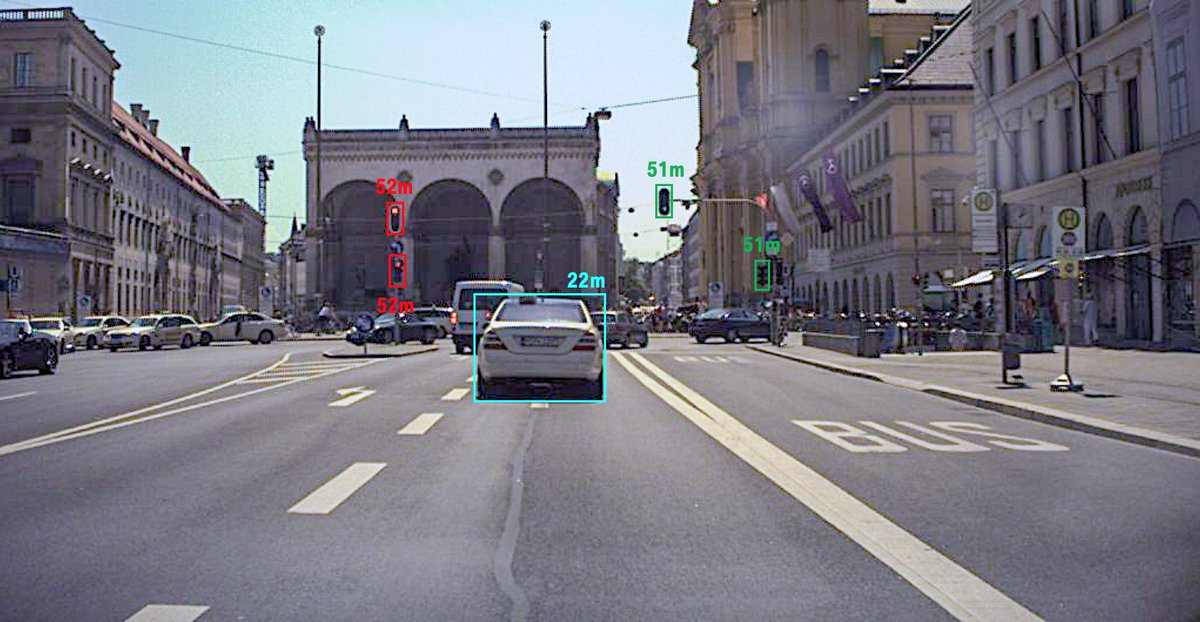
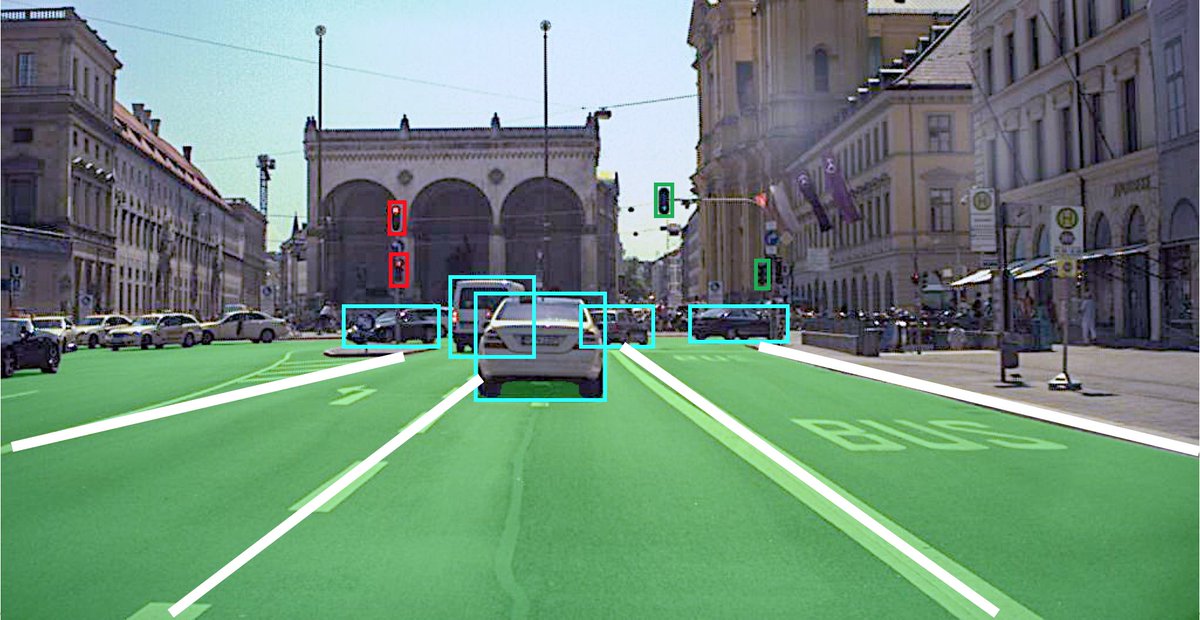
This is an example from Tesla of what a typical camera sees and detects in the scene. Videos from other companies look very similar.
2️⃣ Radar
The radar is one of the oldest sensors used for automation - it is used since 1999 for adaptive cruise control.
It uses the Doppler effect to measure distance and relative velocity to other objects and is very accurate.
Again, modern cars usually have several radars.
The radar is one of the oldest sensors used for automation - it is used since 1999 for adaptive cruise control.
It uses the Doppler effect to measure distance and relative velocity to other objects and is very accurate.
Again, modern cars usually have several radars.


Classical radars have fairly low resolution and the raw data is difficult to interpret visually. There is a new generation of imaging radars that promise much better resolution!
Take a look at this video to get an intuition what a radar "sees".
Take a look at this video to get an intuition what a radar "sees".
3️⃣ Lidar
This is the hot topic in self-driving cars currently!
A laser scanner shoots multiple rays measuring distance to objects and they do this very accurately.
360° lidars are typical for L4 cars, but smaller lidars are already being integrated into production cars.
This is the hot topic in self-driving cars currently!
A laser scanner shoots multiple rays measuring distance to objects and they do this very accurately.
360° lidars are typical for L4 cars, but smaller lidars are already being integrated into production cars.



There are many companies now working on solid state lidars that can be easily integrated in the grill of a car.
Take a look at this video to see how the point cloud from such a lidar looks like.
Take a look at this video to see how the point cloud from such a lidar looks like.
Comparison 🔀
There is no perfect sensor - each of them has its own advantages and disadvantages! Take a look the the table below for a comparison.
The best way is to combine all of them for maximum redundancy and robustness! No everybody agrees to that, though... 🤷♂️
There is no perfect sensor - each of them has its own advantages and disadvantages! Take a look the the table below for a comparison.
The best way is to combine all of them for maximum redundancy and robustness! No everybody agrees to that, though... 🤷♂️

If you liked this thread and want to read more about self-driving cars and machine learning follow me @haltakov!
I have many more threads like this planned 😃
I have many more threads like this planned 😃
• • •
Missing some Tweet in this thread? You can try to
force a refresh