Sharing some LaTeX hacks I like (and trying to crowdsource more)!
*Teaser*
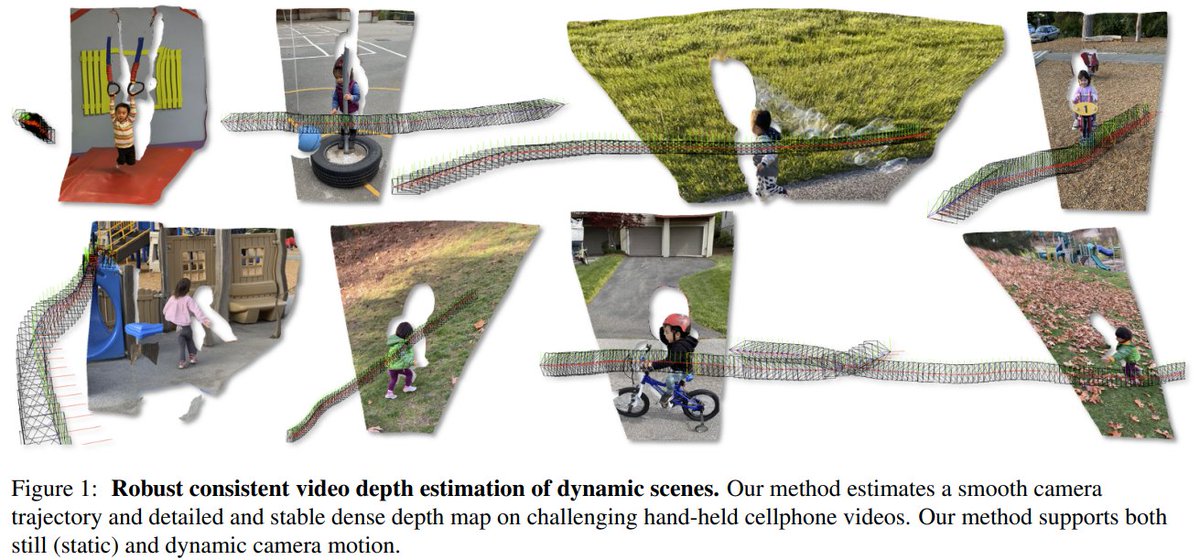
Popularized by Randy Pausch's paper in 1996, now most papers start with a teaser. Make sure that you have an awesome one.
\twocolumn[{
\renewcommand\twocolumn[1][]{#1}
\maketitle
\input{teaser}
}]
*Teaser*
Popularized by Randy Pausch's paper in 1996, now most papers start with a teaser. Make sure that you have an awesome one.
\twocolumn[{
\renewcommand\twocolumn[1][]{#1}
\maketitle
\input{teaser}
}]
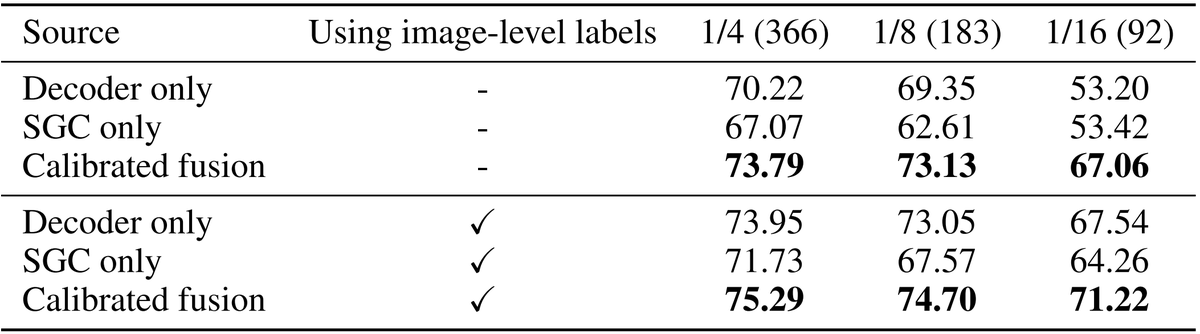
*Table formatting*
I feel that 10% of my job is to replace \hline with \toprule, \midrule, and \bottomrule. Formatting your table well will help you convey your messages much more clearly.
Check out: people.inf.ethz.ch/markusp/teachi…
I feel that 10% of my job is to replace \hline with \toprule, \midrule, and \bottomrule. Formatting your table well will help you convey your messages much more clearly.
Check out: people.inf.ethz.ch/markusp/teachi…
*Quickly remove in-line comments*
This hack can quickly help estimate paper length w/o comments, particularly helpful when you close to the submission deadline!
\usepackage{ifthenifthen}
\newcommand{\final}{1}
\ifthenelse{\equal{\final}{1}}
{
\renewcommand{\jiabin}[1]{}
}{}
This hack can quickly help estimate paper length w/o comments, particularly helpful when you close to the submission deadline!
\usepackage{ifthenifthen}
\newcommand{\final}{1}
\ifthenelse{\equal{\final}{1}}
{
\renewcommand{\jiabin}[1]{}
}{}
*Topic*
I like to use \paragraph{blah blah blah.} to help organize the structure of the paper. However, it is hard to adjust spacing. Instead, I use \topic{blah} so that I can control all the spacing consistently.
\newcommand{\topic}[1]{\vspace{1mm}\noindent\textbf{#1}}
I like to use \paragraph{blah blah blah.} to help organize the structure of the paper. However, it is hard to adjust spacing. Instead, I use \topic{blah} so that I can control all the spacing consistently.
\newcommand{\topic}[1]{\vspace{1mm}\noindent\textbf{#1}}
*Figure caption title*
Having a figure caption *title* helps readers navigate your figures efficiently. Use \figcaption to replace \caption.
\renewcommand{\figcaption}[2]{
\caption{\textbf{#1} #2}
}
BTW, I first learn about this via M. Irani’s papers.
weizmann.ac.il/math/irani/pub…
Having a figure caption *title* helps readers navigate your figures efficiently. Use \figcaption to replace \caption.
\renewcommand{\figcaption}[2]{
\caption{\textbf{#1} #2}
}
BTW, I first learn about this via M. Irani’s papers.
weizmann.ac.il/math/irani/pub…
https://twitter.com/jbhuang0604/status/1279992089611247617
• • •
Missing some Tweet in this thread? You can try to
force a refresh