What is a self-driving car engineer? 🧑💻 🧠 🚙
It's not a single job description - there are many roles in a self-driving project!
🧠 Machine Learning
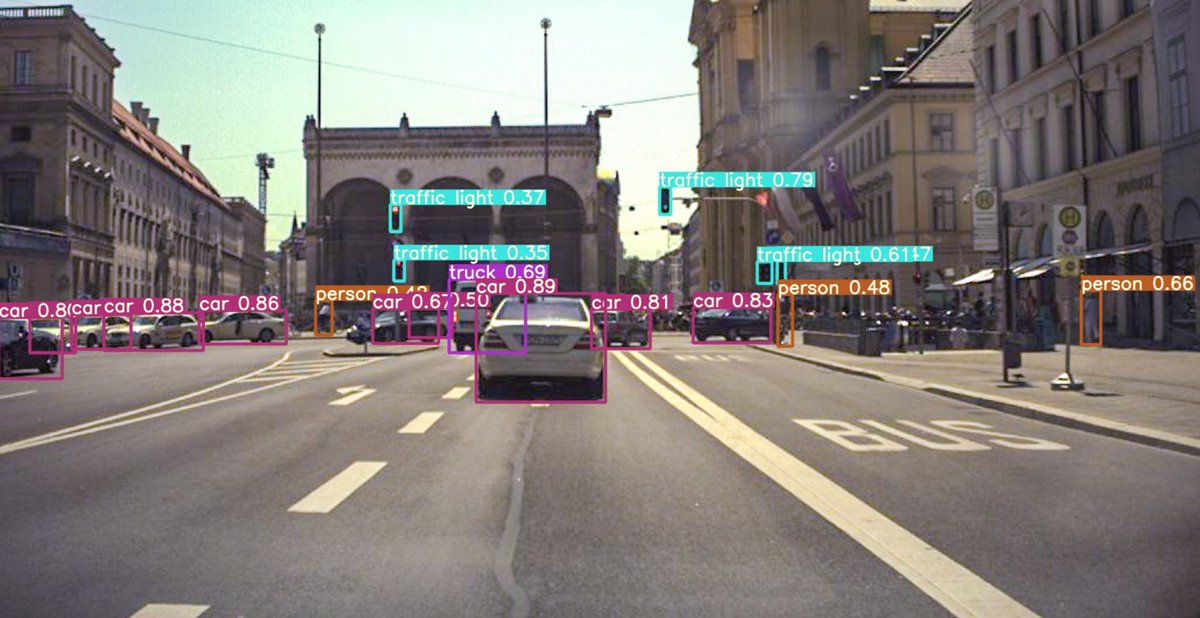
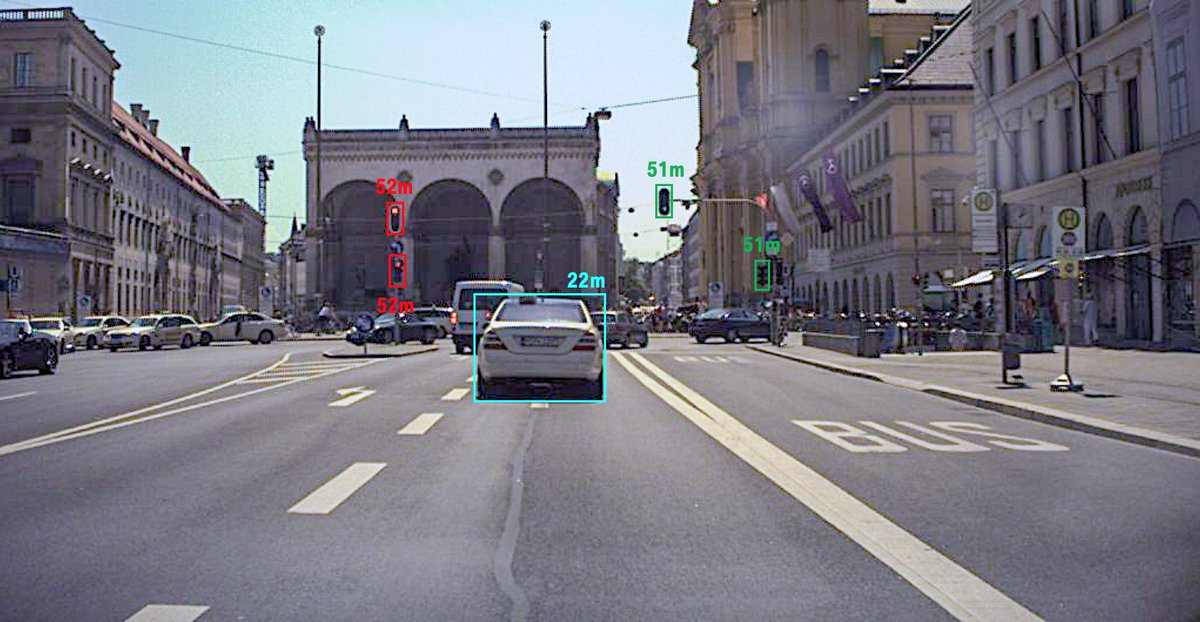
👀 Computer Vision
💽 Big Data
🕹️ Simulation
✅ Test and Validation
🦺 Safety
💻 Software Development
Read more below 👇
It's not a single job description - there are many roles in a self-driving project!
🧠 Machine Learning
👀 Computer Vision
💽 Big Data
🕹️ Simulation
✅ Test and Validation
🦺 Safety
💻 Software Development
Read more below 👇
🧠 Machine Learning Engineer 

👀 Computer Vision Engineer

💽 Big Data Engineer

🕹️ Simulation Engineer

✅ Test and Validation Engineer

💻 Software Engineer

🦺 Safety Engineer

If you want to become a self-driving car engineer try to find a role that best fits your current skill set and you have a good chance! 👍😀
• • •
Missing some Tweet in this thread? You can try to
force a refresh