Probablemente ya sepas cómo es y de qué es capaz, pero hoy te voy a contar cómo se vuela.
Os presento al V-22 Osprey, desde una perspectiva algo diferente...
Os presento al V-22 Osprey, desde una perspectiva algo diferente...

Vamos por partes. El V-22 es una 'aeronave de rotores basculantes', es decir, dispone de rotores o hélices cuyo vector de empuje (tracción en este caso) es orientable, de manera que puede ser tanto vertical (mismo principio que un helicóptero) como horizontal (como un avión).

Estos rotores o hélices no son ni como el rotor de un helicóptero ni como las hélices de un avión turbohélice convencional, se trata de híbridos, definidos muy bien en inglés con la palabra prop-rotor (propeller + rotor), que será como los llamaremos a partir de ahora.

Ambos prop-rotors reciben potencia de sendas turbinas de gas, al igual que muchos helicópteros y los aviones turbohélice convencionales. Además, están unidos mediante un eje que discurre entre ambas góndolas a través del ala. La APU se acopla a éste en la sección central del ala.

Para aclarar el eterno dilema de si es más avión que helicóptero o viceversa, dejo esto en manos de sus pilotos. En sus palabras, se trata de "un turbohélice capaz de detenerse en el aire", pues al final la mayor parte del tiempo vuela como tal.
Básicamente, el Osprey tiene 3 modos de vuelo, según el ángulo de inclinación de las góndolas de los motores con respecto a su eje horizontal (no el horizonte):
• VTOL: 85º-96º (sí, ligeramente hacia detrás)
• Transición: 1º-84º
• Avión: 0º
• VTOL: 85º-96º (sí, ligeramente hacia detrás)
• Transición: 1º-84º
• Avión: 0º

Pero vamos a la chicha del hilo. Os presento la cabina o 'cockpit' del V-22. En rojo tenéis señalados los principales mandos de vuelo, que introduciré a continuación, para que entendáis cómo los pilotos controlan la aeronave a través de ellos.

THRUST CONTROL LEVER (TCL)
La palanca de gases. Esencialmente controla la cantidad de empuje que proporcionan los prop-rotors, incrementando el paso de las palas y la potencia entregada por los ejes tanto como se requiera para ello, hasta el límite de par.
La palanca de gases. Esencialmente controla la cantidad de empuje que proporcionan los prop-rotors, incrementando el paso de las palas y la potencia entregada por los ejes tanto como se requiera para ello, hasta el límite de par.
Conviene aclarar que los prop-rotors trabajan a revoluciones (RPM) constantes. Así, cuando aumenta el paso de las palas (β), el eje demanda más torque (par) para mantener las RPM, y el motor aumenta el régimen de trabajo (más combustible y sube la Tª de combustión).
(Inciso) Las palas son como 'alas', aumentar su paso es aumentar su ángulo de ataque. Esto hace que sustenten más (más empuje), pero también generan más resistencia, por lo que cuesta más hacerlas girar.

Por ello, el funcionamiento de los TCL es análogo para los modos VTOL (equivalente a más mando "colectivo") y avión (más gas). Resumen: TCL adelante, más empuje. Sólo existe algo de confusión en los pilotos de helicóptero, (...)

(...) pues cambia su lógica de 'más colectivo <--> tirar del mando' a 'más colectivo <--> empujar el mando'.
PALANCA
- En modo VTOL = palanca de helicóptero (mando cíclico).
- En modo avión = palanca de avión.
Esto se traduce en las siguientes acciones de mando:
- En modo VTOL = palanca de helicóptero (mando cíclico).
- En modo avión = palanca de avión.
Esto se traduce en las siguientes acciones de mando:
• En modo VTOL:
Controla los prop-rotors cíclicamente utilizando un sistema de platos exactamente igual al empleado por los helicópteros para su control y se ayuda a veces de la ubicación excéntrica de los motores.
Controla los prop-rotors cíclicamente utilizando un sistema de platos exactamente igual al empleado por los helicópteros para su control y se ayuda a veces de la ubicación excéntrica de los motores.
(Inciso) Los platos cíclicos permiten con su movimiento que las palas adquieran un ángulo de paso (β) diferente según la zona (mitad) del recorrido en el que se encuentren, generando más sustentación y elevando ligeramente las palas de esa mitad del rotor.

¡OJO! Esto no es exactamente así por la precesión giroscópica. Estando sentado en mi cabina, si quiero que las palas produzcan más sustentación en mi sector derecho para ir hacia la izquierda, tengo que aumentar el paso en el sector trasero, 90º antes.

Esto hace que se incline el plano descrito por las puntas de pala (TPP), cambiando ligeramente la orientación del vector sustentación. Así, se introduce una componente horizontal de la fuerza y un momento, que tienden a desplazar la aeronave y a inclinarla, respectivamente.

A grandes rasgos, pasa esto 👇. Como podéis ver, la pala sube al pasar por el sector en el que genera más sustentación, que es la zona donde la pala aumenta su paso (β). Si os fijáis en el horizonte, se ve la diferencia entre la zona más alta y la más baja del recorrido cíclico.
En cambio, si el plato se mueve de forma uniforme, dando más ángulo de paso a todas las palas por igual, se está aplicando colectivo, equivalente a dar más sustentación y mando empleado para "subir" en un helicóptero. Como ves, es muy parecido al cambio de paso en un turbohélice.
Así:
- Cabeceo (VTOL): palanca hacia delante y detrás actúa sobre el paso cíclico correspondiente.
- Alabeo (VTOL): palanca hacia los lados actúa sobre el paso cíclico correspondiente y colectivo opuesto en cada lado para crear momento en el eje longitudinal.
- Cabeceo (VTOL): palanca hacia delante y detrás actúa sobre el paso cíclico correspondiente.
- Alabeo (VTOL): palanca hacia los lados actúa sobre el paso cíclico correspondiente y colectivo opuesto en cada lado para crear momento en el eje longitudinal.

• En modo avión:
Controles convencionales de aeronave de ala fija. La palanca acciona el timón de profundidad para el cabeceo y los flaperones (hacen las veces de flap y alerones) para controlar el alabeo.
Controles convencionales de aeronave de ala fija. La palanca acciona el timón de profundidad para el cabeceo y los flaperones (hacen las veces de flap y alerones) para controlar el alabeo.

PEDALES
En modo VTOL actúan generando paso cíclico opuesto en cada prop-rotor, de manera que uno tiende a avanzar y otro a retroceder.
En modo avión, controlan los timones de dirección.
En modo VTOL actúan generando paso cíclico opuesto en cada prop-rotor, de manera que uno tiende a avanzar y otro a retroceder.
En modo avión, controlan los timones de dirección.

Todo esto es importante, pero la verdadera magia está en la transición, ese momento en el que el Osprey no se encuentra en ninguna configuración pura. Esta transición es posible gracias a un mando que los pilotos tienen en el TCL, al alcance de su pulgar.
Las góndolas basculan hacia la horizontal mientras se acciona hacia delante esta pequeña ruedecita con muelle de retorno, siendo la velocidad angular proporcional al giro de la misma hasta un máximo de 8º/s. El accionamiento inverso bascula las góndolas hacia la vertical.
En el modo de transición entra en juego gran parte de la magia y verdadera innovación tecnológica del Osprey: un sistema de control de vuelo (FCS) absolutamente impresionante, sobre todo teniendo en cuenta que se desarrolló en los años 90, aunque llevó años acabar de pulirlo.

Se trata de un sistema fly-by-wire triplemente redundante que simplifica al máximo la tarea del piloto en una aeronave tan complicada. Entre otras cosas, puede realizar la transición de forma totalmente autónoma, proporciona sensaciones artificiales en los mandos de vuelo (...)
(...) y diferentes valores de ganancia (sensibilidad); más alta en el modo VTOL, donde los movimientos deben ser más precisos, y menor en el modo avión, donde la velocidad hace cada vez más notable la respuesta a la deflexión de las superficies aerodinámicas.

Durante la transición manual, el FCS combina las contribuciones de los actuadores de control en los modos VTOL y avión, reduciendo progresivamente la acción de los controles VTOL al bajar el ángulo de las góndolas y aumentar la velocidad.

Así, cuando transiciona a modo avión, los platos de los prop-rotors cada vez producen una menor variación del paso cíclico de las palas, mientras que los flaperones y timones ganan efectividad con la velocidad aerodinámica; y viceversa, para la transición de vuelta a modo VTOL.
En el modo transición, la aeronave transita un 'pasillo de protección' dentro de la envolvente de velocidades y posición de góndola (en la foto). Es decir, para cada ángulo θ de la góndola, existen una velocidad mínima y máxima de vuelo.

La velocidad mínima está dada por la capacidad del ala de complementar a los prop-rotors en generar una sustentación suficiente. Esto es función de la velocidad aerodinámica en el caso del ala y de la componente vertical del vector de empuje, variable según sea la (...)
(...) inclinación de la góndola en el caso de los motores. La velocidad mínima también está limitada por la posición del centro de gravedad (se adelanta conforme disminuye el ángulo de la góndola). Si la velocidad aerodinámica es demasiado baja, el estabilizador horizontal (...)
(...) no podrá proporcionar la suficiente sustentación negativa (hacia abajo) como para compensar la tendencia del avión a ser demasiado cabezón.
La velocidad máxima del pasillo de protección está limitada, por su parte, por las cargas aerodinámicas generadas en el prop-rotor cuando el ángulo es mayor que 0°.
Los límites dibujados en este pasillo son función del peso (esto se expresa como f(GW) en el gráfico). Asimismo, existe una envolvente diferente para cada altitud de densidad, siendo la que he puesto antes la envolvente a nivel del mar.
El FCS contiene todos estos datos y guía al piloto a través del pasillo, impidiéndole realizar un movimiento de góndola fuera de los límites. Además, muestra al piloto la posición de las góndolas frente a los límites angulares en su PFD.



Una vez en modo avión, el Osprey puede acelerar hasta una velocidad máxima aerodinámica de unos 280 kt (520 km/h). Sin embargo, existe una pequeña limitación que debe ser resuelta antes: el régimen transónico en punta de pala.

Como podéis ver, la velocidad aerodinámica que ve una sección de pala tiene dos componentes: debido a la rotación de la hélice y debido al avance de la aeronave. Cuando una aumenta, es inmediato ver cómo aumenta también la velocidad total, por suma vectorial.

Cuando la velocidad total que ve la pala alcanza un valor tal que se alcanza Mach = 1 en un punto del fluido (localmente), se llega al llamado Mach crítico, que aumenta muchísimo la resistencia (por haber ondas de choque) y cuesta más girar la hélice, reduciendo la eficiencia.

Como en todo movimiento circular, la velocidad tangencial a lo largo de una pala de hélice es mayor cuanto más lejos del eje de rotación se encuentre, por lo que las puntas de las palas serán la parte que verá mayor velocidad debido al giro.

Así las cosas, habrá una velocidad aerodinámica a la que vuele la aeronave para la cual aparecerán efectos transónicos (al alcanzar el Mach crítico) en la zona de punta de pala. Esta será una gran limitación, dado el enorme diámetro de los prop-rotors del Osprey.

La solución pasa por actuar sobre la velocidad de rotación de los prop-rotors, i.e. las RPM. Cuando el Osprey pasa a modo avión, el piloto mantiene adelantada ruedecita de rotación de las góndolas algo de tiempo más de lo necesario cuando llegan a 0º, y la deja volver a su sitio.

Esto reduce automáticamente las RPM del 100% al 84%. De manera análoga, al volver a modo VTOL, el piloto acciona de nuevo la ruedecita de la misma forma para recuperar el 100% de RPM. El límite de vuelo para el 100% de RPM está alrededor de los 220 kt (407 km/h).
Además de una mayor velocidad, esto reduce las vibraciones y permite un crucero más eficiente. En esta etapa del vuelo no se requiere tanta potencia y, como Pot = RPM · Par, la caída en las RPM demanda menos potencia del motor, lo que redunda en un menor consumo.

Una vez descrito el funcionamiento básico de la aeronave, no se me pueden escapar un par de detalles de calidad únicos que le proporciona al Osprey su peculiar configuración.
Supongo que recordáis algo raro en los posibles ángulos de inclinación de las góndolas, ¿verdad? Efectivamente, en modo VTOL esto es 85º - 96º, pudiendo controlar el ángulo de asiento (morro respecto a horizonte) durante en estacionario para tomar en superficies inclinadas.

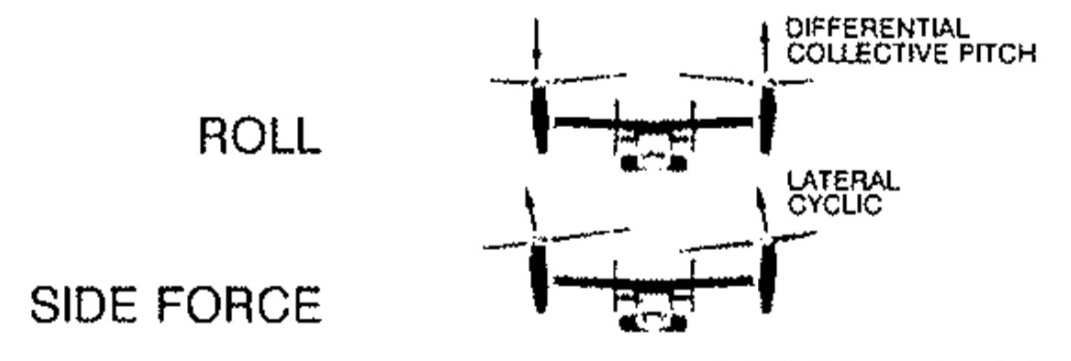
Esto también puede hacerlo lateralmente, con una funcionalidad llamada Lateral Translation Mode (LTM), que compensa fuerzas y momentos oponiendo cíclico lateral a colectivo diferencial en ambos motores para lograr un determinado ángulo de balance en vuelo estacionario.

El giro de las góndolas también es una herramienta muy útil para los pilotos a la hora de avanzar en vuelo estacionario. Según estés haciendo un ajuste fino o quieras moverte bastante distancia, puedes aplicar cíclico hacia delante o simplemente inclinar ligeramente las góndolas.

Por último, y estoy seguro de que os lo estaríais preguntando, el Osprey también puede despegar con carrera de despegue, como un avión normal. Ahora bien, de una forma algo especial, pues como es sabido, no puede rotar las góndolas hasta 0º mientras se encuentra en tierra...
Lo que sí que puede hacer es rotar las góndolas hasta 85º - 60º, obteniendo una cierta velocidad horizontal antes de irse al aire, ya con apoyo sustentador del ala. De esta forma es capaz de incrementar el peso máximo al despegue en torno a un 8% (2 toneladas), o consumir menos.
Una vez visto cómo se vuela el Osprey en condiciones normales, la gran pregunta es, ¿qué pasa cuando algo va mal? La desconfianza por su innovadora configuración y un programa de desarrollo accidentado han propiciado una leyenda negra que el paso del tiempo demuestra infundada.

Para empezar, va cargado de redundancias, de manera que los sistemas críticos como el hidráulico o los ordenadores de control de vuelo están triplicados, por lo que si falla uno, otro ocupa su lugar de forma equivalente. Esto, entre otras cosas, le ha valido la fama de duro.

Otra característica clave para su supervivencia es la unión mecánica de sus motores a través de una transmisión, que he comentado anteriormente. Esto permite accionar ambos prop-rotors con un sólo motor operativo, limitando enormemente las consecuencias de un fallo de motor.
El Osprey es capaz de aterrizar en modo VTOL con un solo motor, aunque forzándolo algo más de la cuenta. Pero, ¿qué ocurriría en el improbable caso de un doble fallo de motor?
En modo avión, simplemente debe confiar en planear y aterrizar lo mejor que pueda como un avión convencional. Como los prop-rotors probablemente golpearían el suelo, están diseñados para romper de forma que afecte lo menos posible al aterrizaje forzoso.
En modo VTOL, el procedimiento adecuado sería el equivalente al de un helicóptero: la autorrotación. Esto consiste en descender manteniendo el rotor girando gracias a la velocidad vertical, como si fuera un aerogenerador, rotando a RPM óptimas, ajustadas con el mando colectivo.

Más colectivo, más resistencia al giro del rotor y menos RPM; y viceversa, ajustando fino en el óptimo. La fuerza aerodinámica en las palas tiene dos componentes: una las hace girar y otra genera sustentación, que compensa la gravedad y establece al helicóptero en un descenso.
Al llegar al suelo, la energía almacenada en el rotor en forma de movimiento (inercia), es aprovechada para generar un plus de sustentación a costa de las RPM, tirando de colectivo hasta liberarla toda. Así, el helicóptero reduce su velocidad vertical hasta posarse.

Pero esto creo que os lo puede explicar mucho mejor Don @juanesparza, aviador y marino, que sabe mucho más que yo del asunto, y ya ha escrito sobre ello. 👇
Llegados a este punto, creo que ya estáis en disposición de entender cómo es volar esta peculiar aeronave, nacida experimental y desarrollada hasta lograr un modelo completamente operacional que aporta unas capacidades totalmente desconocidas en el campo de batalla.

Antes de acabar, no quería dejar de hacer una mención especial a mi alma máter, la @aeroespacialUPM, cuyos alumnos y profesores tuvieron la enorme suerte de ver de cerca un MV-22B Osprey de los Marines en la Base Aérea de Morón, de la mano de su tripulación.

Y... ¡esto es todo, amigos! Espero que lo hayáis disfrutado y, ojalá también, hayáis aprendido. Ya sabéis, ¡compartid todo lo que queráis!

[Aunque algo tarde, querría hacer un último inciso. Dado el pequeño diámetro de los prop-rotors y, por tanto, su baja inercia, las autorrotaciones del Osprey son muy complicadas y de hecho, no se ha demostrado que sean del todo seguras, pero no dejan de ser un último recurso.]