
,
11 tweets,
5 min read
Read on Twitter
👩💻 @argoai's release of Argoverse is game-changing for self-driving car research.
🗺 290km of mapped roadway
👀 11,319 tracked objects with raw sensor data
🧠 327,790 sequences of interesting scenarios
🔌 A thoughtful API to interact with the data
Let's explore...
🗺 290km of mapped roadway
👀 11,319 tracked objects with raw sensor data
🧠 327,790 sequences of interesting scenarios
🔌 A thoughtful API to interact with the data
Let's explore...
1️⃣ Why is Argoverse special?
Argoverse is the most comprehensive dataset release of its kind, enabling deep experimentation in the fields of both perception and prediction.
What makes it so comprehensive? It includes HD maps!
Argoverse is the most comprehensive dataset release of its kind, enabling deep experimentation in the fields of both perception and prediction.
What makes it so comprehensive? It includes HD maps!

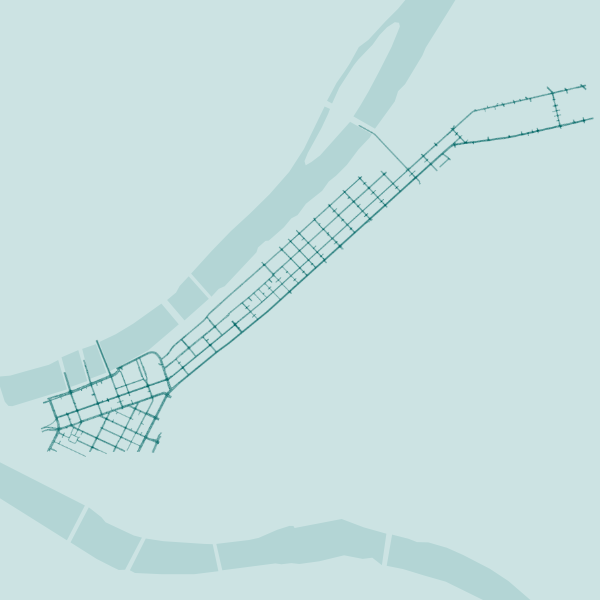
2️⃣ Self-driving car datasets rarely include a HD map, let alone two.
Argoverse includes over 290km of mapped Miami and Pittsburgh roadway, making the included datasets 10x more useful for perception and prediction research.
This is a big deal.
Argoverse includes over 290km of mapped Miami and Pittsburgh roadway, making the included datasets 10x more useful for perception and prediction research.
This is a big deal.


3️⃣ The research community has suffered due to a lack of large-scale motion forecasting datasets. No more!
@argoai mined 1000 hours of driving to generate 327k interesting 5-second segments of ground-truth data.
@argoai mined 1000 hours of driving to generate 327k interesting 5-second segments of ground-truth data.
4️⃣ Why is this motion forecasting dataset valuable?
Engineers can train prediction models on this ground-truth data, to better guess what objects (cars, pedestrians, etc.) around the self-driving car will do next.
Better predictions means a smoother, and safer ride.
Engineers can train prediction models on this ground-truth data, to better guess what objects (cars, pedestrians, etc.) around the self-driving car will do next.
Better predictions means a smoother, and safer ride.
5️⃣ Argoverse includes a challenge to the community to generate benchmarks.
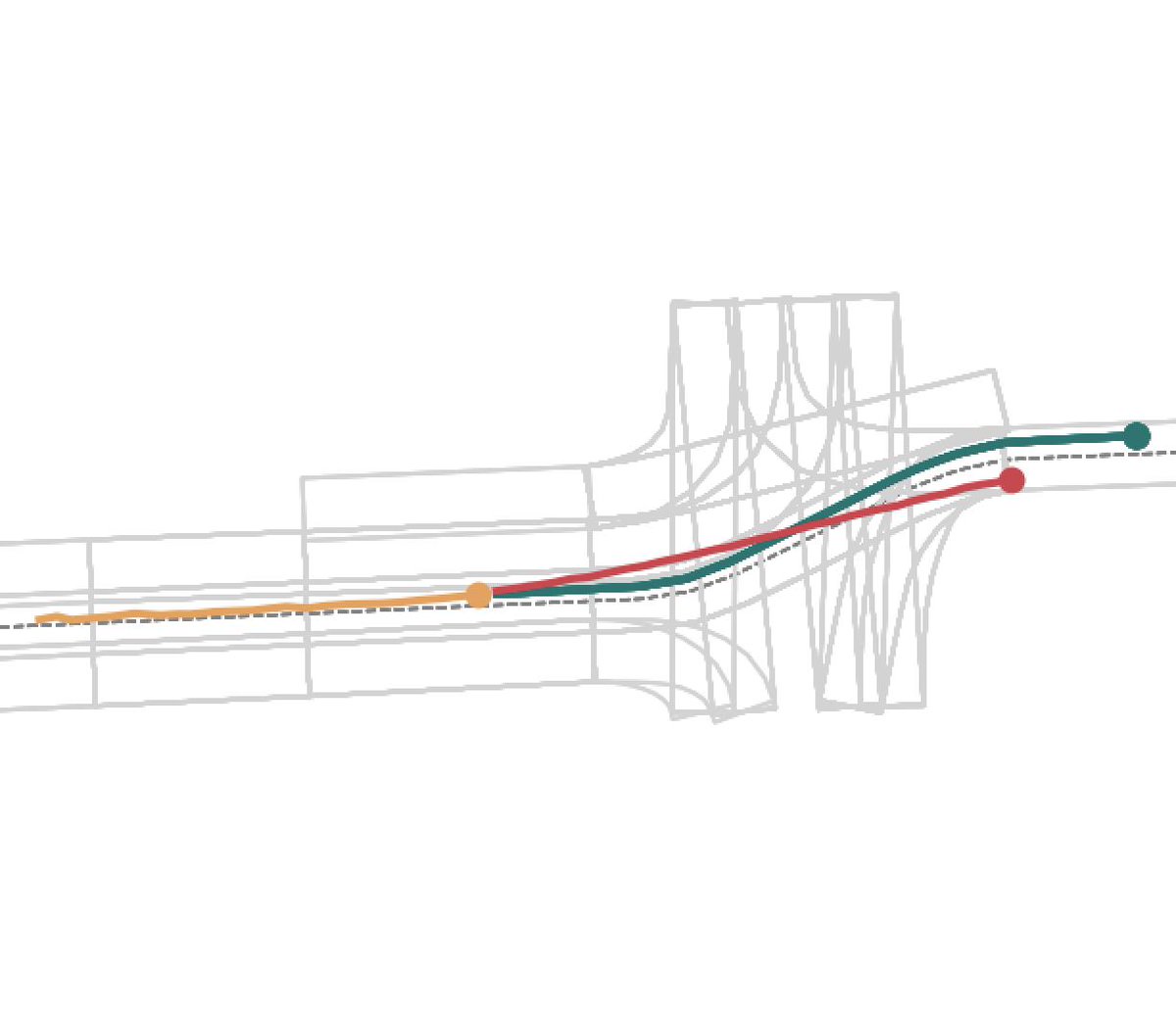
For motion forecasting, given 2 seconds of motion, can you predict what the object will do in the next 3?
Here is an attempt from @argoai. Red is ground-truth and green is the prediction. Tough problem!
For motion forecasting, given 2 seconds of motion, can you predict what the object will do in the next 3?
Here is an attempt from @argoai. Red is ground-truth and green is the prediction. Tough problem!
6️⃣ The beauty of Argoverse is that the map and the motion forecasting dataset sing in harmony, enabling prediction approaches which utilize low-level map data. This is awesome!
7️⃣ It's rather useless to predict what objects are going to do next unless you track those objects accurately over time.
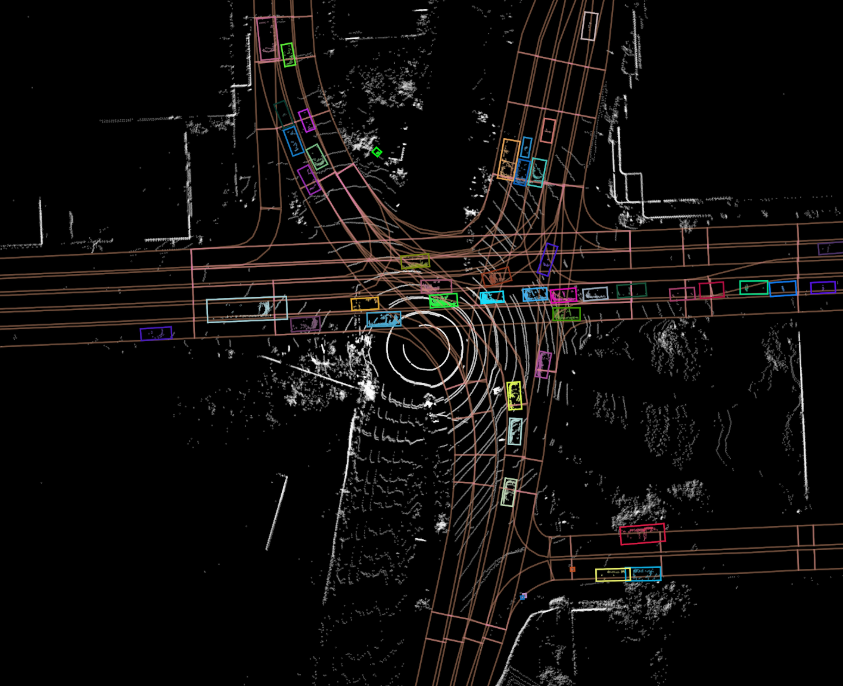
This is where Argoverse's 3D object tracking dataset comes in handy. @argoai has released 11,319 tracked objects recorded across 113 15-30 second segments.
This is where Argoverse's 3D object tracking dataset comes in handy. @argoai has released 11,319 tracked objects recorded across 113 15-30 second segments.
8️⃣ This ground-truth data is immensely useful to experiment on new perception algorithms with.
What makes this 3D object tracking dataset even more special is, you guessed it, the included HD map! Utilizing lane-level information can improve your perception accuracy.
What makes this 3D object tracking dataset even more special is, you guessed it, the included HD map! Utilizing lane-level information can improve your perception accuracy.
9️⃣ After playing with Argoverse today, I'm really impressed with the thoughtfulness and rigor @argoai has demonstrated. They even include @ProjectJupyter notebooks to get you started quickly.
Argoverse is going to enable a whole bunch of innovation. The community is grateful 🙏
Argoverse is going to enable a whole bunch of innovation. The community is grateful 🙏





