
After a recent tweet by a friend of mine who was dismayed that no-one cared about the lunar rovers on the moon’s surface, I decided to make a thread on rovers – both manned and robotic.
So here we go …….. “Rovers – Past, Present and Future.”
So here we go …….. “Rovers – Past, Present and Future.”

1/57
Rovers had been planned for the surfaces of other planets since the early 1950s but it wasn’t until the Soviet Union launched Luna 17 carrying the Lunokhod 1 rover on 10th Nov 1970 that this became a reality.
Rovers had been planned for the surfaces of other planets since the early 1950s but it wasn’t until the Soviet Union launched Luna 17 carrying the Lunokhod 1 rover on 10th Nov 1970 that this became a reality.

2/57
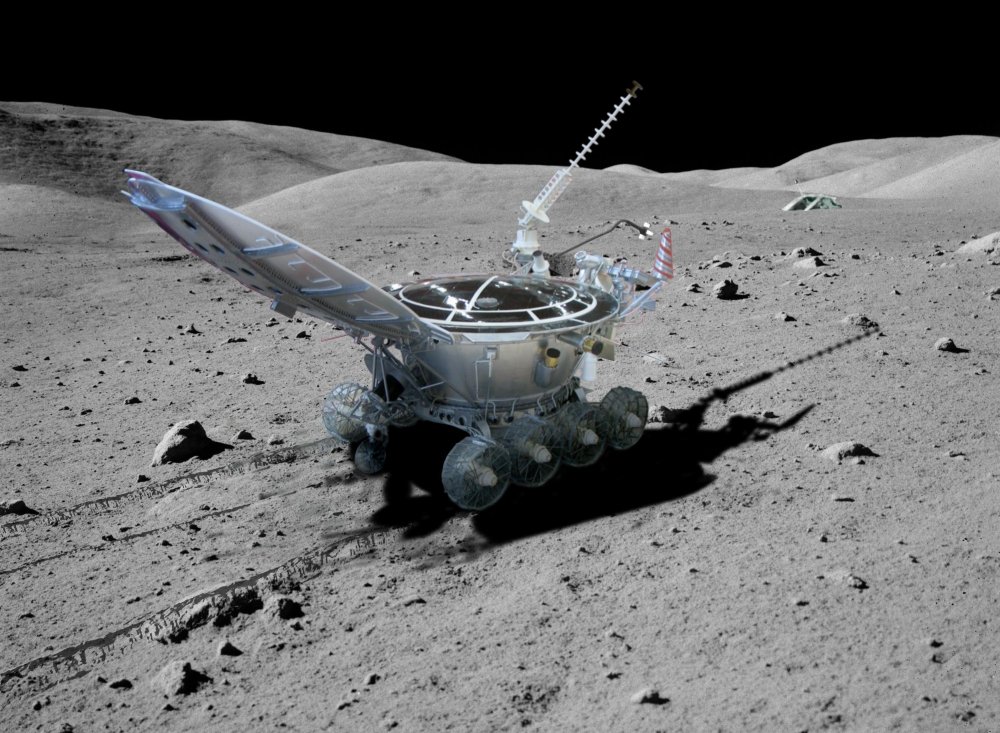
Lunokhod means “moonwalker” in Russian. There were two Lunokhod rovers launched in
1970 and 1973 respectively and were the first remote controlled rovers on the moon. It wasn’t until 1997 than another rover (Mars Pathfinder) was placed on an extraterrestrial body.
Lunokhod means “moonwalker” in Russian. There were two Lunokhod rovers launched in
1970 and 1973 respectively and were the first remote controlled rovers on the moon. It wasn’t until 1997 than another rover (Mars Pathfinder) was placed on an extraterrestrial body.

3/57
The Lunokhod program was not all plain sailing. The very first Lunokhod rover was lost when the Proton rocket (Luna E-8 201) carrying it exploded at T+51 seconds resulting in polonium 210 from the radioisotope heater unit being spread over a large region of Russia.
The Lunokhod program was not all plain sailing. The very first Lunokhod rover was lost when the Proton rocket (Luna E-8 201) carrying it exploded at T+51 seconds resulting in polonium 210 from the radioisotope heater unit being spread over a large region of Russia.

4/57
Lunokhod 1 lasted 322 days and travelled 10.5 km (6.5 miles)
Using its TV and panoramic cameras it shot more than 20,000 images and over 200 panoramas. It also completed soil analysis and x-ray spectroscopy
This is a shot of the Luna 17 lander taken from the rover.
Lunokhod 1 lasted 322 days and travelled 10.5 km (6.5 miles)
Using its TV and panoramic cameras it shot more than 20,000 images and over 200 panoramas. It also completed soil analysis and x-ray spectroscopy
This is a shot of the Luna 17 lander taken from the rover.

5/57
The second Soviet lunar rover (Lunokhod 2) explored a variety of lunar surface features including upland areas and rilles. It returned even more images and data then the previous model.
The second Soviet lunar rover (Lunokhod 2) explored a variety of lunar surface features including upland areas and rilles. It returned even more images and data then the previous model.
6/57
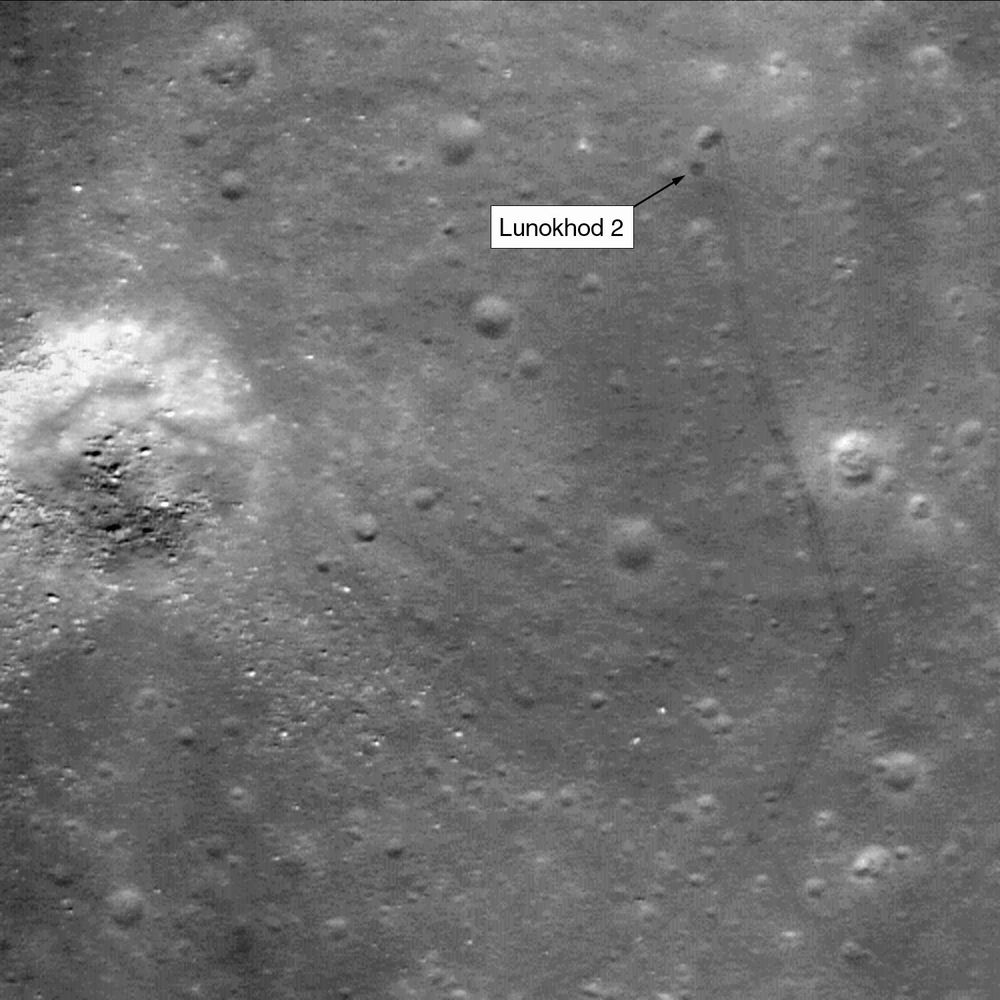
Until 2014, Lunokhod 2 held the record for the longest distance of surface travel of any extraterrestrial vehicle. It covered 42 km (26 miles) over its four months of operation.
Until 2014, Lunokhod 2 held the record for the longest distance of surface travel of any extraterrestrial vehicle. It covered 42 km (26 miles) over its four months of operation.

7/57
In Dec 1993, Lunokhod 2 and the Luna 21 lander were sold by Lavochkin at Sotheby's. @richardGarriott stated in 2001 "I purchased Lunakod 21 from the Russians. I am now the world's only private owner of an object on a foreign celestial body”.
In Dec 1993, Lunokhod 2 and the Luna 21 lander were sold by Lavochkin at Sotheby's. @richardGarriott stated in 2001 "I purchased Lunakod 21 from the Russians. I am now the world's only private owner of an object on a foreign celestial body”.
8/57
In between the successes of the Soviet Lunokhod 1 and 2 rovers, the Apollo J -missions deployed the first manned rovers used on another celestial body - the Lunar Rover Vehicles or LRVs. Pictured is the Apollo 15 lunar rover.
In between the successes of the Soviet Lunokhod 1 and 2 rovers, the Apollo J -missions deployed the first manned rovers used on another celestial body - the Lunar Rover Vehicles or LRVs. Pictured is the Apollo 15 lunar rover.

9/57
One of the early prototypes, constructed for the Local Scientific Survey Module (LSSM) design brief was made by Brown Engineering in 1965. It consisted of little more than a stout chassis, a protective roll bar, a battery pack, and a motor at each wheel.
One of the early prototypes, constructed for the Local Scientific Survey Module (LSSM) design brief was made by Brown Engineering in 1965. It consisted of little more than a stout chassis, a protective roll bar, a battery pack, and a motor at each wheel.

10/57
Thought lost, this early prototype rover turned up in a scrapyard in Huntsville, Alabama in 2016. It was then passed to @RRauction for sale.
Thought lost, this early prototype rover turned up in a scrapyard in Huntsville, Alabama in 2016. It was then passed to @RRauction for sale.

11/57
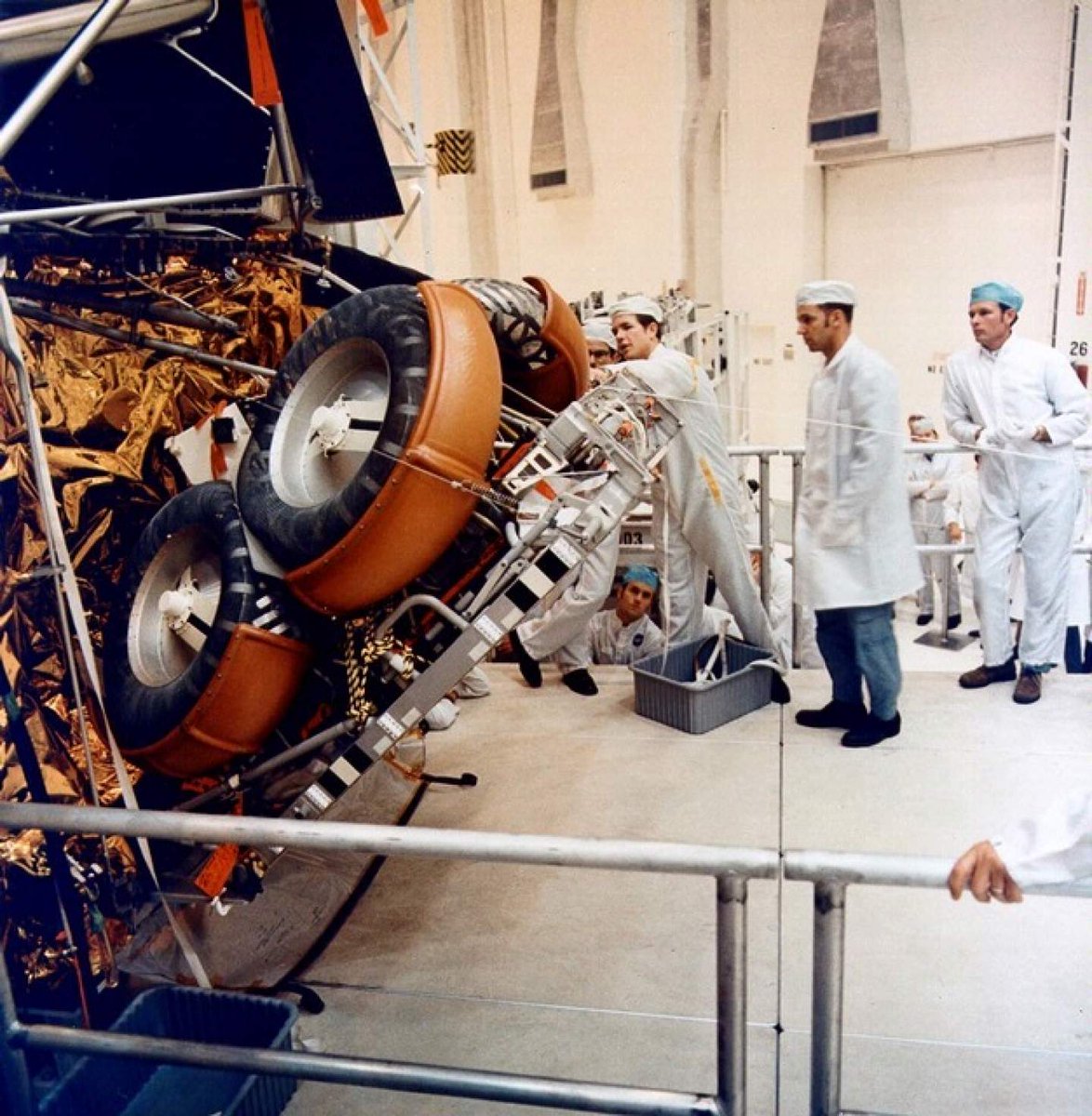
Young, Cernan, Haise, Duke, England, Fullerton and Peterson (L to R) inspecting the Lunar Roving Vehicle at the NASA Marshall Space Flight Center where is was designed and tested.
All were members of #Apollo 16 and Apollo 17 prime, backup or support crews.
Young, Cernan, Haise, Duke, England, Fullerton and Peterson (L to R) inspecting the Lunar Roving Vehicle at the NASA Marshall Space Flight Center where is was designed and tested.
All were members of #Apollo 16 and Apollo 17 prime, backup or support crews.

12/57
The lunar rovers were cleverly designed to fold up in order to fit within the structure of the Lunar Module descent stage. The pic and video link show how this is achieved.
The lunar rovers were cleverly designed to fold up in order to fit within the structure of the Lunar Module descent stage. The pic and video link show how this is achieved.
13/57
The rover was first used on 31 July 1971, during the Apollo 15 but was then used on all the Apollo J missions (15,16 and 17) during 1971 and 1972.
This is a superb HD stabilized video of the Apollo 16 LRV riding around on the lunar surface
The rover was first used on 31 July 1971, during the Apollo 15 but was then used on all the Apollo J missions (15,16 and 17) during 1971 and 1972.
This is a superb HD stabilized video of the Apollo 16 LRV riding around on the lunar surface

14/57
Designed to be robust, the LRV only experienced minor issues on the moon. Both times a fender was lost or damaged through accidental collision. Apollo 17 Cernan & Schmitt bodged together a fender extension using EVA maps, duct tape, and a pair of clamps from the LM.
Designed to be robust, the LRV only experienced minor issues on the moon. Both times a fender was lost or damaged through accidental collision. Apollo 17 Cernan & Schmitt bodged together a fender extension using EVA maps, duct tape, and a pair of clamps from the LM.

15/57
The tracks left by the rovers along with the final resting place of each LVR were captured by the Lunar Reconnaissance Orbiter during passes over the Taurus-Littrow region in 2009 and 2011 and can be clearly seen in the picture.
The LRV is bottom right.
The tracks left by the rovers along with the final resting place of each LVR were captured by the Lunar Reconnaissance Orbiter during passes over the Taurus-Littrow region in 2009 and 2011 and can be clearly seen in the picture.
The LRV is bottom right.

16/57
Next up is one of the smaller rovers in this thread but one of my favourites.
The NASA Sojourner rover was part of the Mars Pathfinder mission.
This shot was taken from the lander just after Sojourner had left the access ramp.
Next up is one of the smaller rovers in this thread but one of my favourites.
The NASA Sojourner rover was part of the Mars Pathfinder mission.
This shot was taken from the lander just after Sojourner had left the access ramp.

17/57
Sojourner (previously called Rocky IV and also the MFEX rover) launched aboard a Delta II rocket from KSC on 4th December 1996.
Sojourner (previously called Rocky IV and also the MFEX rover) launched aboard a Delta II rocket from KSC on 4th December 1996.

18/57
The mission was planned to last only 7 days but continued to day 85 in which time the rover covered a distance of just over 100 meters (330 ft). This is the view from Sojourner looking back at the Mars Pathfinder lander which was renamed the Carl Sagan Memorial Station.
The mission was planned to last only 7 days but continued to day 85 in which time the rover covered a distance of just over 100 meters (330 ft). This is the view from Sojourner looking back at the Mars Pathfinder lander which was renamed the Carl Sagan Memorial Station.

19/57
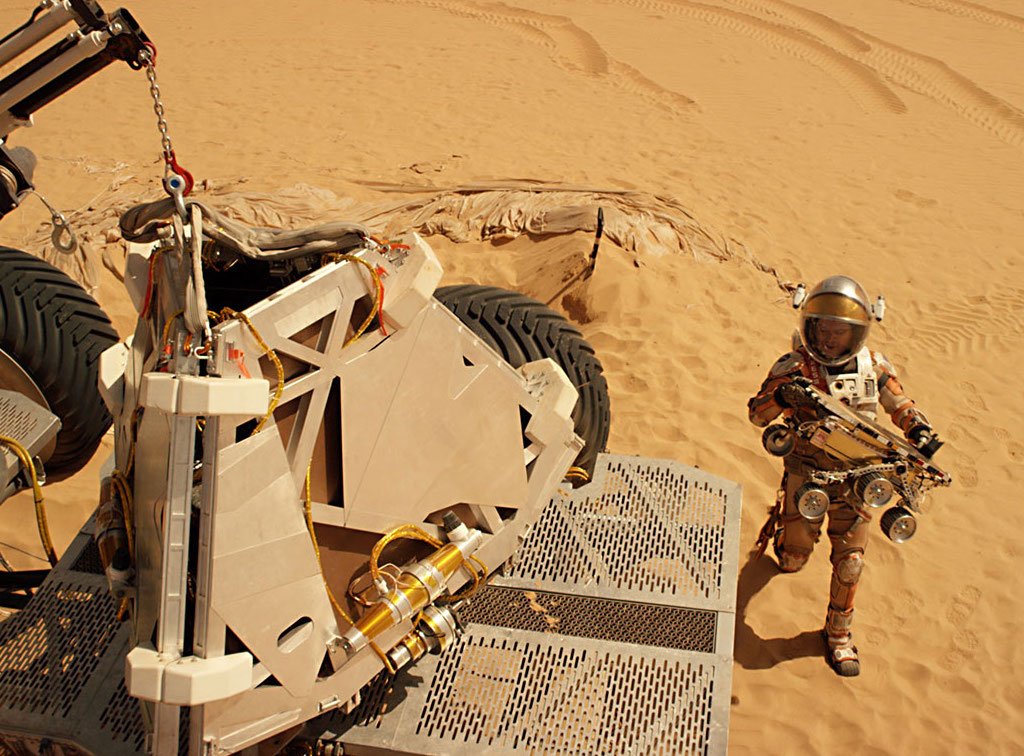
Popularised (slightly) by an appearance in the @andywier film The Martian. This pic shows the lead character Mark Watney lifting Sojourner onto his vehicle next to the collected pathfinder lander.
Popularised (slightly) by an appearance in the @andywier film The Martian. This pic shows the lead character Mark Watney lifting Sojourner onto his vehicle next to the collected pathfinder lander.
20/57
After Sojourner came the Mars Exploration Rovers (MER-A and MER-B).
Gaining the names Spirit and Opportunity through a student essay competition won by Sofi Collis, a third-grade Russian-American student from Arizona.
After Sojourner came the Mars Exploration Rovers (MER-A and MER-B).
Gaining the names Spirit and Opportunity through a student essay competition won by Sofi Collis, a third-grade Russian-American student from Arizona.
21/57
Spirit (MER-A) was launched from Cape Canaveral on a Delta II rocket on 10th June 2003.
Spirit (MER-A) was launched from Cape Canaveral on a Delta II rocket on 10th June 2003.

22/57
Spirit lands successfully on Mars at 04:35UTC on 4th January 2004 using a combination of heat resistant aeroshell, parachute, retro-rockets and inflatable airbags to protect it.
This was three weeks before its twin, Opportunity, lands on the other side of the planet.
Spirit lands successfully on Mars at 04:35UTC on 4th January 2004 using a combination of heat resistant aeroshell, parachute, retro-rockets and inflatable airbags to protect it.
This was three weeks before its twin, Opportunity, lands on the other side of the planet.

23/57
First colour image compiled from images by Spirit. It was the highest resolution colour image taken on another planet.
First colour image compiled from images by Spirit. It was the highest resolution colour image taken on another planet.

24/57
On 2nd Feb 2004, Spirit honours the fallen astronauts from the Space Shuttle Columbia's final mission when NASA names a set of hills the Columbia Hills Complex, denoting seven peaks as Anderson, Brown, Chawla, Clark, Husband, McCool, and Ramon.
On 2nd Feb 2004, Spirit honours the fallen astronauts from the Space Shuttle Columbia's final mission when NASA names a set of hills the Columbia Hills Complex, denoting seven peaks as Anderson, Brown, Chawla, Clark, Husband, McCool, and Ramon.

25/57
A Martian sunset taken by Spirit at the Gusev crater on 19th May 2005.
A Martian sunset taken by Spirit at the Gusev crater on 19th May 2005.

26/57
Spirit make an exciting observation on 10th march 2005 when it catches footage of a Martian dust devil.
Scientists subsequently acknowledged that this may have inadvertently swept the solar panels clean extending mission.
Spirit make an exciting observation on 10th march 2005 when it catches footage of a Martian dust devil.
Scientists subsequently acknowledged that this may have inadvertently swept the solar panels clean extending mission.
27/57
On 1st may 2009, Spirit becomes bogged in an area of soft soil.
@Nasa JPL begins a “Free Spirit” campaign
Despite months of attempts to move the it, a harsh martian winter and the rovers inability to clean its panels resulted in communication loss on 22nd March 2010.
On 1st may 2009, Spirit becomes bogged in an area of soft soil.
@Nasa JPL begins a “Free Spirit” campaign
Despite months of attempts to move the it, a harsh martian winter and the rovers inability to clean its panels resulted in communication loss on 22nd March 2010.

28/57
On the 24th May 2011, NASA announced that efforts to communicate with the unresponsive rover had ended, calling the mission complete. Assets, personnel and future efforts were then diverted to the remaining rover Opportunity.
On the 24th May 2011, NASA announced that efforts to communicate with the unresponsive rover had ended, calling the mission complete. Assets, personnel and future efforts were then diverted to the remaining rover Opportunity.

29/57
The stable mate of Spirit was the Opportunity rover (MER-B) which was launched from Cape Canaveral on a Delta II rocket on 7th July 2003
The stable mate of Spirit was the Opportunity rover (MER-B) which was launched from Cape Canaveral on a Delta II rocket on 7th July 2003

30/57
It landed in Meridiani Planum on 25th January 2004, three weeks after its twin – Spirit.
Opportunity managed to image its own heatshield impact crater and part of the aeroshell.
It landed in Meridiani Planum on 25th January 2004, three weeks after its twin – Spirit.
Opportunity managed to image its own heatshield impact crater and part of the aeroshell.

31/57
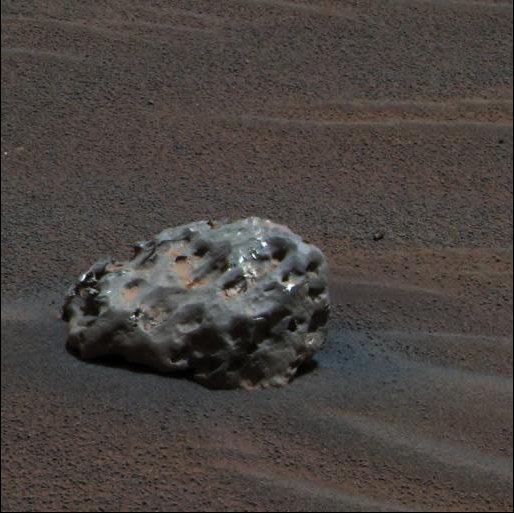
Very close to this impact crater, Opportunity later found the first meteorite on mars – a large iron nickel #meteorite nicknamed “Heat Shield Rock”.
It was more formally named the Meridiani Planum meteorite.
Very close to this impact crater, Opportunity later found the first meteorite on mars – a large iron nickel #meteorite nicknamed “Heat Shield Rock”.
It was more formally named the Meridiani Planum meteorite.
32/57
The original science goals of the mars explorations rovers related to Martian geology – to characterize a wide range of rocks and soils that might hold clues to past water activity on Mars.
The original science goals of the mars explorations rovers related to Martian geology – to characterize a wide range of rocks and soils that might hold clues to past water activity on Mars.

33/57
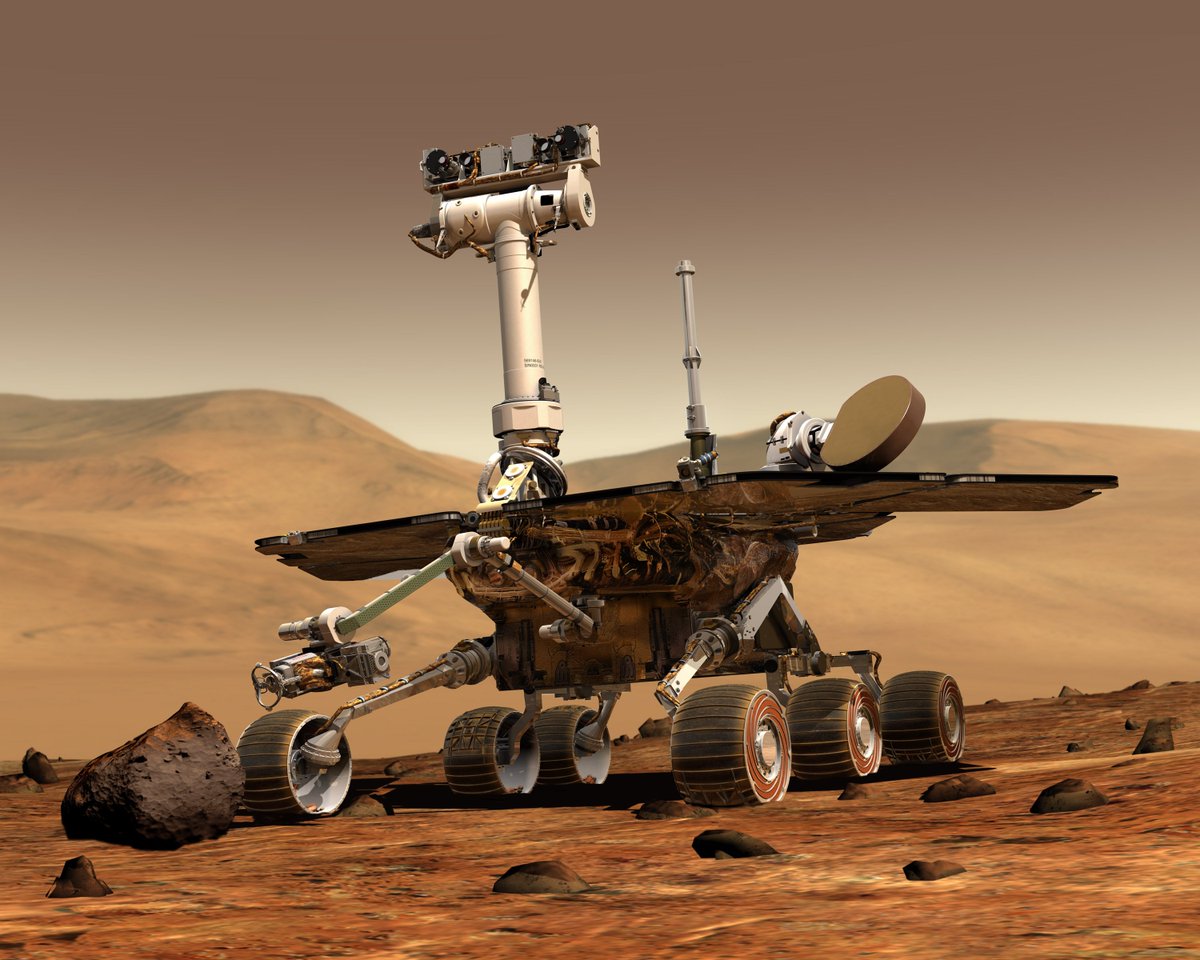
On 24th Jan 2014, NASA reported that Opportunity (and the later Curiosity rover) will now be searching for evidence of ancient life.
Pictured is a simulated view of “Oppy” in Endurance Crater.
On 24th Jan 2014, NASA reported that Opportunity (and the later Curiosity rover) will now be searching for evidence of ancient life.
Pictured is a simulated view of “Oppy” in Endurance Crater.

34/57
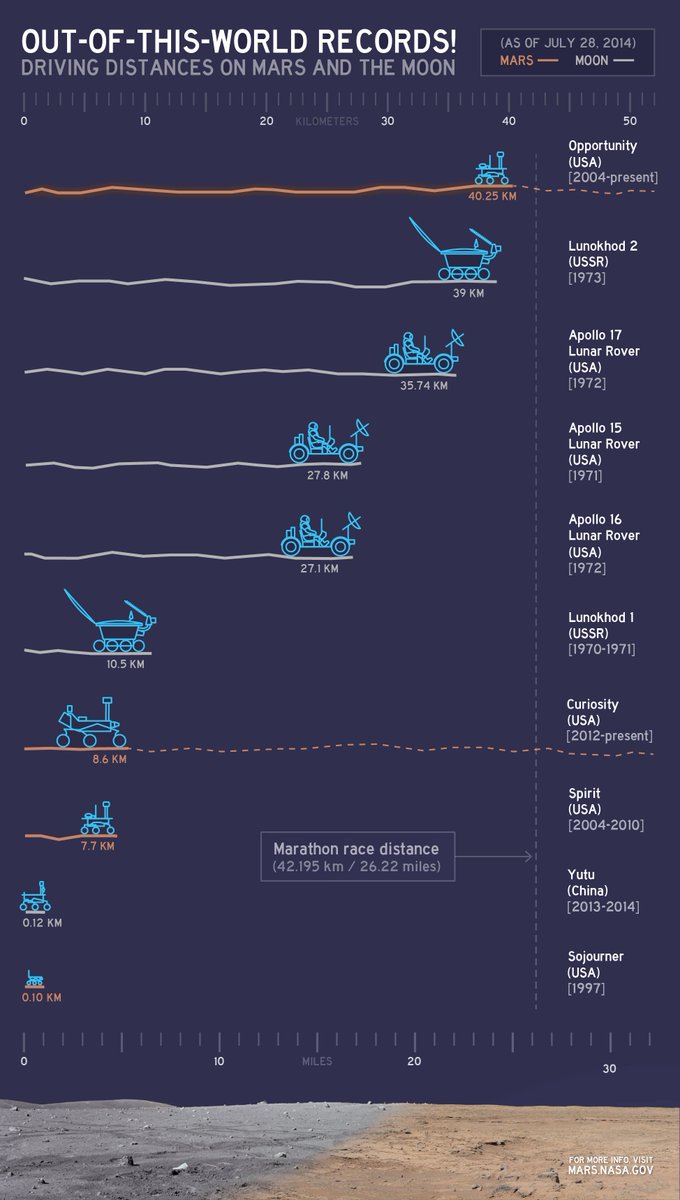
On 28th July 2014, it was announced that Opportunity, having traversed over 40 km (25 mi), had become the rover achieving the longest off-world distance, surpassing the previous record of 39 km (24 mi) on the Moon by Lunokhod 2.
On 28th July 2014, it was announced that Opportunity, having traversed over 40 km (25 mi), had become the rover achieving the longest off-world distance, surpassing the previous record of 39 km (24 mi) on the Moon by Lunokhod 2.
35/57
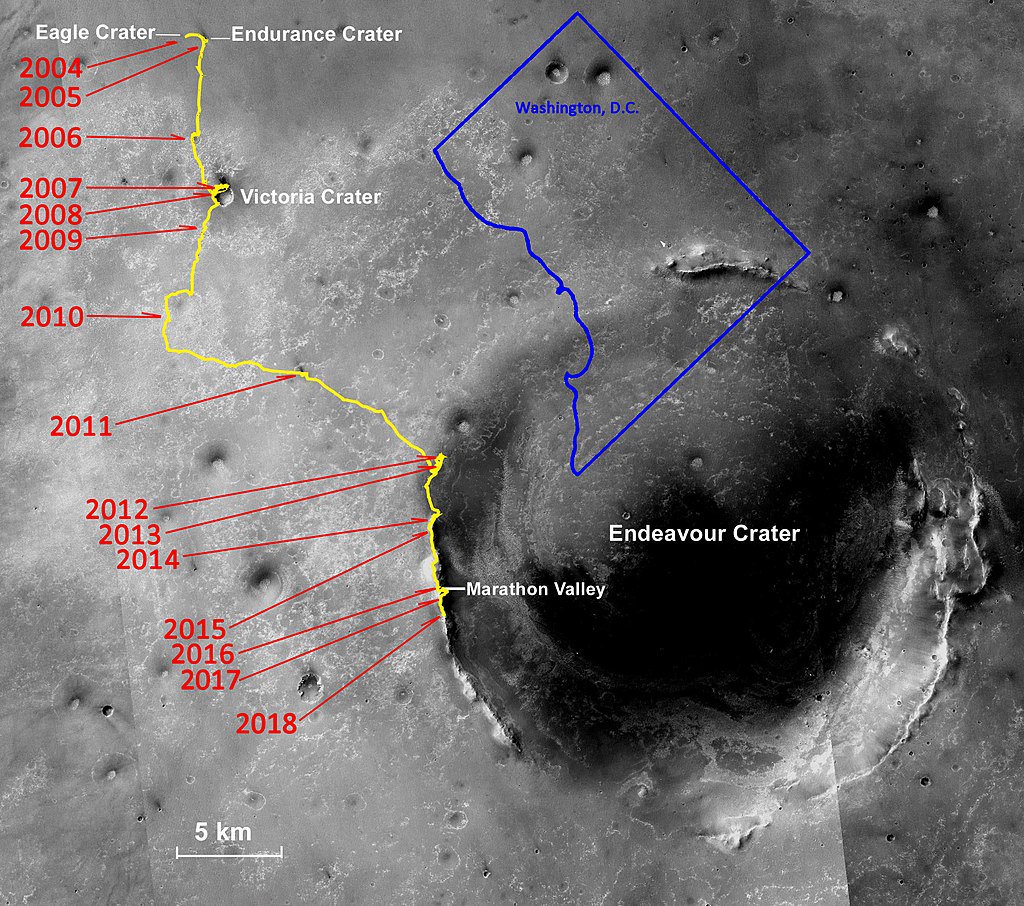
After traversing massive distances and completing amazing science on Mars, no signal from Opportunity has been heard since Sol 5111 (10th June 2018).
After traversing massive distances and completing amazing science on Mars, no signal from Opportunity has been heard since Sol 5111 (10th June 2018).
36/57
The team think Oppy has experienced a low-power, mission clock or up-loss timer fault and is continuing to listen for the rover using the Deep Space Network (DSN) to send "sweep and beeps".
Pictured is an earlier shot of Orion crater from April 2017.
The team think Oppy has experienced a low-power, mission clock or up-loss timer fault and is continuing to listen for the rover using the Deep Space Network (DSN) to send "sweep and beeps".
Pictured is an earlier shot of Orion crater from April 2017.


38/57
The Mars Science Laboratory (of which Curiosity was a part) was launched from Cape Canaveral on 26th Nov 2011 aboard a @ulalaunch Atlas V rocket.
The Mars Science Laboratory (of which Curiosity was a part) was launched from Cape Canaveral on 26th Nov 2011 aboard a @ulalaunch Atlas V rocket.

39/57
The lander reached Aeolis Palus in the Gale Crater on 6th August 2012. The MSL mission used a variety of different engineering solutions to ensure the safe arrival of Curiosity to the Martian surface including a new supersonic parachute.
The lander reached Aeolis Palus in the Gale Crater on 6th August 2012. The MSL mission used a variety of different engineering solutions to ensure the safe arrival of Curiosity to the Martian surface including a new supersonic parachute.

40/57
The most innovative of these was the sky crane. A retro rocket powered platform that hovered over the Martian surface whilst lowering the rover to softly touchdown after which it flew away – impacting the Martian surface a safe distance away.
The most innovative of these was the sky crane. A retro rocket powered platform that hovered over the Martian surface whilst lowering the rover to softly touchdown after which it flew away – impacting the Martian surface a safe distance away.

41/57
After touching down at the Bradbury landing site, Curiosity has (to date) travelled 12.27 miles (19.75 kilometers) around the Gale Crater.
After touching down at the Bradbury landing site, Curiosity has (to date) travelled 12.27 miles (19.75 kilometers) around the Gale Crater.

42/57
Curiosity has made some amazing discoveries using the huge range of onboard scientific equipment.
Curiosity has made some amazing discoveries using the huge range of onboard scientific equipment.

43/57
After the first year Curiosity had determined that ancient Mars could have been hospitable to microbial life!
Pictured are the tracks left after the crossing of the Dingo Gap sand dune.
After the first year Curiosity had determined that ancient Mars could have been hospitable to microbial life!
Pictured are the tracks left after the crossing of the Dingo Gap sand dune.

44/57
Using the camera on the end of its robotic arm, Curiosity is the first rover to have the ability to take a selfie!
This one was taken "Murray Buttes" on Aeolis Mons in September 2016.
Using the camera on the end of its robotic arm, Curiosity is the first rover to have the ability to take a selfie!
This one was taken "Murray Buttes" on Aeolis Mons in September 2016.

45/57
Curiosity is still going strong and has been roving around the Martian surface for 2195 sols (2255 total days).
One of the latest selfies, taken just after a dust storm in the Gale Crater.
Curiosity is still going strong and has been roving around the Martian surface for 2195 sols (2255 total days).
One of the latest selfies, taken just after a dust storm in the Gale Crater.

46/57
Failed or aborted missions.
Lunokhod 3 – cancelled by funding issues
Beagle 2 (and its mole “Pluto”) – failed to deploy after landing
Marsokhod – aborted after the N1 failures
Prop-M rovers – Mars2 crashed and Mars3 failed just after landing (artists impression pictured)
Failed or aborted missions.
Lunokhod 3 – cancelled by funding issues
Beagle 2 (and its mole “Pluto”) – failed to deploy after landing
Marsokhod – aborted after the N1 failures
Prop-M rovers – Mars2 crashed and Mars3 failed just after landing (artists impression pictured)

47/57
More recent rovers include the Chinese Yutu meaning “Jade Rabbit”
Launched on 1st Dec 2013 it landed on 14th Dec 2013 as part of the Chang'e 3 mission.
More recent rovers include the Chinese Yutu meaning “Jade Rabbit”
Launched on 1st Dec 2013 it landed on 14th Dec 2013 as part of the Chang'e 3 mission.

48/57
The lunar night proved problematic and the rover was unable to move after the end of the second lunar night. It ceased all operations on August 3, 2016.
Yutu set the record for the longest operational rover on the Moon's surface.
Pic looking back at the lander.
The lunar night proved problematic and the rover was unable to move after the end of the second lunar night. It ceased all operations on August 3, 2016.
Yutu set the record for the longest operational rover on the Moon's surface.
Pic looking back at the lander.

49/57
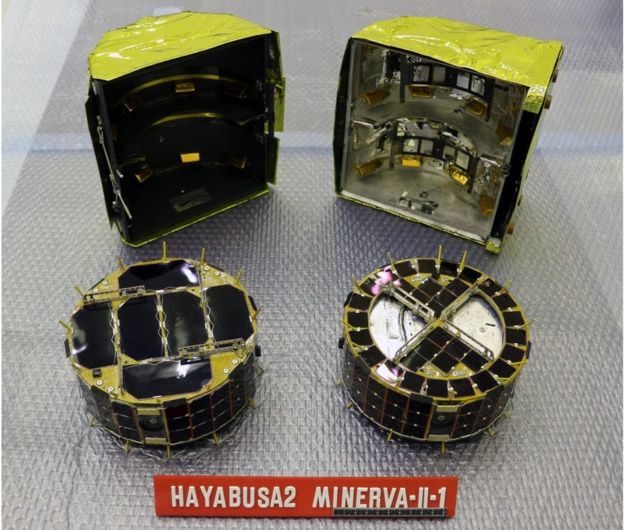
The latest rover mission to another celestial body goes one step further with @JAXA_en’s Hayabusa2 mission which arrived at asteroid 162173 Ryugu.
Two rovers (A & B) inside the first of two Minerva II containers successfully landed on the asteroid surface.
The latest rover mission to another celestial body goes one step further with @JAXA_en’s Hayabusa2 mission which arrived at asteroid 162173 Ryugu.
Two rovers (A & B) inside the first of two Minerva II containers successfully landed on the asteroid surface.
50/57
These two tiny rovers then sent back the first amazing images of Ryugu’s surface.
These two tiny rovers then sent back the first amazing images of Ryugu’s surface.

51/57
The next rover aboard the Hayabusa2 mission is the Mobile Asteroid Surface Scout (MASCOT)
The MASCOT vehicle carries four instruments: an infrared spectrometer, a magnetometer, a radiometer, and a camera.
The next rover aboard the Hayabusa2 mission is the Mobile Asteroid Surface Scout (MASCOT)
The MASCOT vehicle carries four instruments: an infrared spectrometer, a magnetometer, a radiometer, and a camera.

52/57
The second MINERVA II container carries Rover-2. An octagonal prism shaped rover with four mechanisms to help it hop and relocate. Instruments aboard include two cameras, a thermometer and an accelerometer.
It will be released from Hayabusa2 in July 2019.
The second MINERVA II container carries Rover-2. An octagonal prism shaped rover with four mechanisms to help it hop and relocate. Instruments aboard include two cameras, a thermometer and an accelerometer.
It will be released from Hayabusa2 in July 2019.

53/57
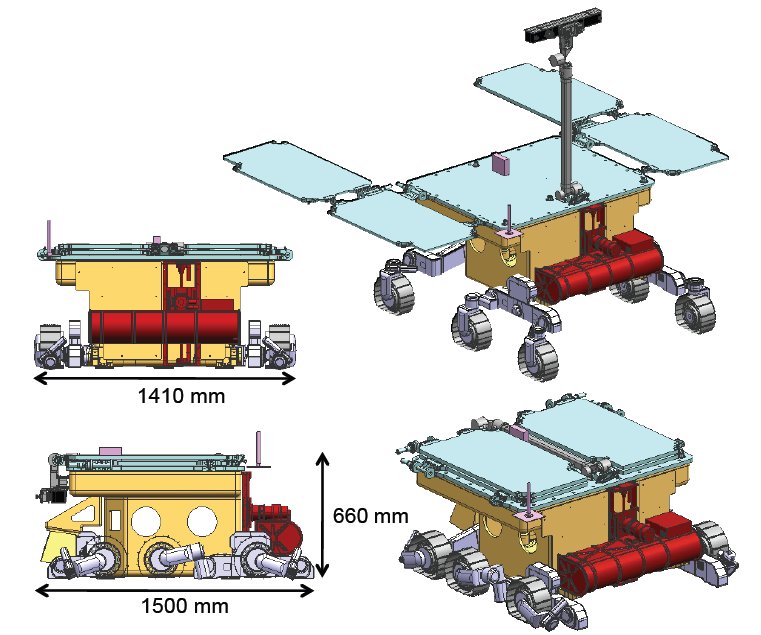
The @ESA_ExoMars rover is a planned robotic Mars rover scheduled for launch in July 2020.
It will be a joint mission between @ESA and @Roscosmos
the solar powered rover operate a seven-month mission to search for the existence of past life on Mars.
The @ESA_ExoMars rover is a planned robotic Mars rover scheduled for launch in July 2020.
It will be a joint mission between @ESA and @Roscosmos
the solar powered rover operate a seven-month mission to search for the existence of past life on Mars.
54/57
Mars 2020 is an unnamed Mars rover mission by @NASA also with a planned launch in July 2020. With similar goals to ExoMars it will investigate the ancient biological and geological environment on Mars, and hunt for biosignatures within accessible geological materials.
Mars 2020 is an unnamed Mars rover mission by @NASA also with a planned launch in July 2020. With similar goals to ExoMars it will investigate the ancient biological and geological environment on Mars, and hunt for biosignatures within accessible geological materials.

55/57
The Mars 2020 rover will share many design features currently employed on the Curiosity rover, but it will carry different scientific instruments and a core drill.
The Mars 2020 rover will share many design features currently employed on the Curiosity rover, but it will carry different scientific instruments and a core drill.

56/57
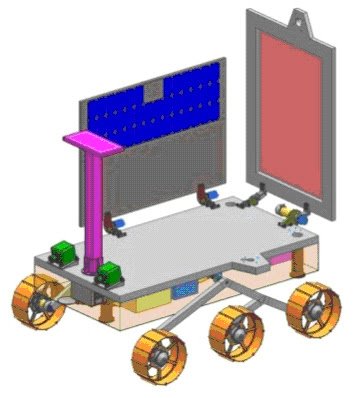
TeamIndus have plans for a lunar lander and accompanying solar powered rover called ECA, an abbreviation for Ek Choti si Asha meaning “A Small Hope”.
Aiming to launch 2019, the rover carries a number of cameras and experiments featuring cyanobacteria and plant materials.
TeamIndus have plans for a lunar lander and accompanying solar powered rover called ECA, an abbreviation for Ek Choti si Asha meaning “A Small Hope”.
Aiming to launch 2019, the rover carries a number of cameras and experiments featuring cyanobacteria and plant materials.

57/57
The Chandrayaan-2 mission consists of a lunar orbiter, a lander, and a rover. This student designed rover will land near one of the lunar poles and will operate for two weeks. The proposed launch is in January 2019.
The Chandrayaan-2 mission consists of a lunar orbiter, a lander, and a rover. This student designed rover will land near one of the lunar poles and will operate for two weeks. The proposed launch is in January 2019.
Amazing twitter people to follow if you like rovers and have enjoyed this thread.
@tanyaofmars @MarsCuriosity @marsrovers @yuri_3_rover @elakdawalla @ESA_ExoMars @RoverChallenge @DiegoU @LUVMI_rover
Big thanks to @NASA @esa and @roscosmos for many of the pics used.
@tanyaofmars @MarsCuriosity @marsrovers @yuri_3_rover @elakdawalla @ESA_ExoMars @RoverChallenge @DiegoU @LUVMI_rover
Big thanks to @NASA @esa and @roscosmos for many of the pics used.






